 |


Ограничение пусковых токов асинхронных
|
|
|
|
Двигателей
При включении асинхронного двигателя в сеть возникает большой пусковой ток, превышающий номинальный в 5… 7 раз и вызывающий в линии значительное падение напряжения, что может привести к остановке рядом работающих двигателей. Под действием пускового тока в двигателе возникают динамические усилия, повреждающие и разрушающие обмотку, нагружаются силовые трансформаторы и линия, что приводит и дополнительным потерям мощности ‚ ограничение пусковых токов особенно актуально для сельскохозяйственных установок из-за удаленности электродвигателей от источников питания и соизмеримости мощности трансформаторов и пусковой мощности электродвигателей. Частые пуски нагревают обмотки двигателя.
Ограничить пусковые токи можно несколькими способами: включением добавочного активного или индуктивного сопротивления в цепь статора; включением добавочного активного или индуктивного сопротивления в цепь ротора; переключением обмотки статора на период пуска с «треугольника» на «звезду»; понижением напряжения на статоре. Схемы снижения пусковых токов путем переключения обмоток со «звезды» на «треугольник» (рис.4.21) можно рекомендовать для электродвигателей, фазные обмотки которых рассчитаны на линейное напряжение. Это относится к электроприводам прессгрануляторов, мощных дробилок и т.п.). В сети с напряжением 380 В необходимо применять двигатели рассчитанные на напряжение 660/380 В. При напряжении сети 380 Ву двигателя должно быть напряжение 380/220 В.
Рассмотрим соотношение пусковых токов двигателя при соединении в «звезду»:
 (4.73)
(4.73)
где  - полное сопротивление обмотки статора при включении.
- полное сопротивление обмотки статора при включении.
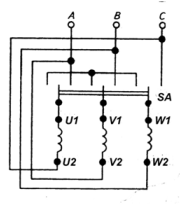
Рис. 4.21. Схема переключения обмоток статора асинхронного
|
|
|
двигателя со «звезды» на «треугольник».
Пусковые токи двигателя при включении обмоток в «треугольник»:
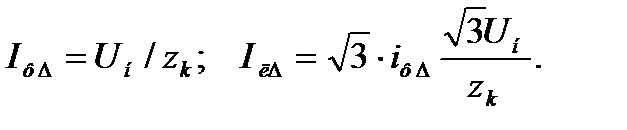
Отношение токов:
 (4.74)
(4.74)
Таким образом, при включении обмоток двигателя в «звезду» фазный  ток уменьшается в
ток уменьшается в  раз, а линейный - в три раза. При понижении напряжения на фазе в
раз, а линейный - в три раза. При понижении напряжения на фазе в  раз момент двигателя уменьшается в три раза.
раз момент двигателя уменьшается в три раза.
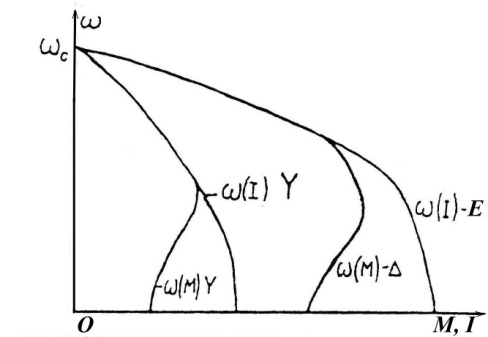
Рис.4.22. Характеристики асинхронного двигателя при
переключении обмоток статора со «звезды» на «треугольник».
Механические и электромеханические характеристики при пуске двигателя этим способом приведены на рис.4.22. Пусковые токи асинхронных двигателей можно ограничить понижением напряжения на статоре.
Пусковой ток асинхронного двигателя при номинальном напряжении питания равен:
где  - сопротивление фазы двигателя в момент включения.
- сопротивление фазы двигателя в момент включения.
Для снижения пускового тока в а раз напряжение на статоре асинхронного двигателя необходимо снизить в это же число раз
 (4.75)
(4.75)
Уменьшение напряжения на статоре вызывает снижение пускового момента двигателя в  или
или  (1 -
(1 -  . На рис.4.23 изображены механические и электромеханические характеристики асинхронного двигателя при снижении пускового тока а два раза. Значительное уменьшение пусковых моментов позволяет использовать данный способ в основном при пуске двигателей на холостом ходу с небольшим относительно
. На рис.4.23 изображены механические и электромеханические характеристики асинхронного двигателя при снижении пускового тока а два раза. Значительное уменьшение пусковых моментов позволяет использовать данный способ в основном при пуске двигателей на холостом ходу с небольшим относительно  , моментом трогания.
, моментом трогания.
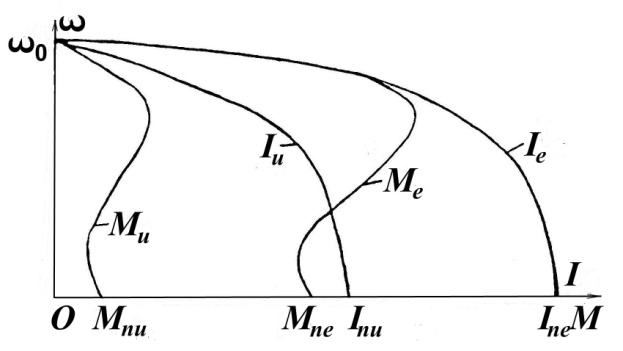
Рис.4.23. Характеристики асинхронного двигателя при понижении
напряжения.
В расчетах при выборе двигателя обязательна проверка на возможность пуска при понижении напряжения:  .
.
Ограничить пусковые токи асинхронных двигателей можно включением добавочного активного или индуктивного сопротивления в цепь статора [16].
Расчет значения добавочного активного  или индуктивного
или индуктивного  сопротивления начинают с выбора необходимого пускового тока
сопротивления начинают с выбора необходимого пускового тока  и определения кратности снижения этого тока:
и определения кратности снижения этого тока:
 ,
,
где  - пусковой ток двигателя при отсутствии сопротивления в
- пусковой ток двигателя при отсутствии сопротивления в
|
|
|
цепи статора,  =
= 
 номинальное фазное напряжение сети; сопротивление обмотки фазы статора;
номинальное фазное напряжение сети; сопротивление обмотки фазы статора;  - пусковой ток при введении добавочного сопротивления в цепь статора,
- пусковой ток при введении добавочного сопротивления в цепь статора,  - полное сопротивление цепи обмотки статора при введении или
- полное сопротивление цепи обмотки статора при введении или 
Подставим значения токов и
a =  .
.
Для определения необходимого значения  cтроят треугольник сопротивлений (рис.4.24).
cтроят треугольник сопротивлений (рис.4.24).
Рассчитываем полное сопротивление обмотки двигателя:
Затем активное сопротивление
 ,
,
где  - коэффициент мощности двигателя при пуске;
- коэффициент мощности двигателя при пуске;

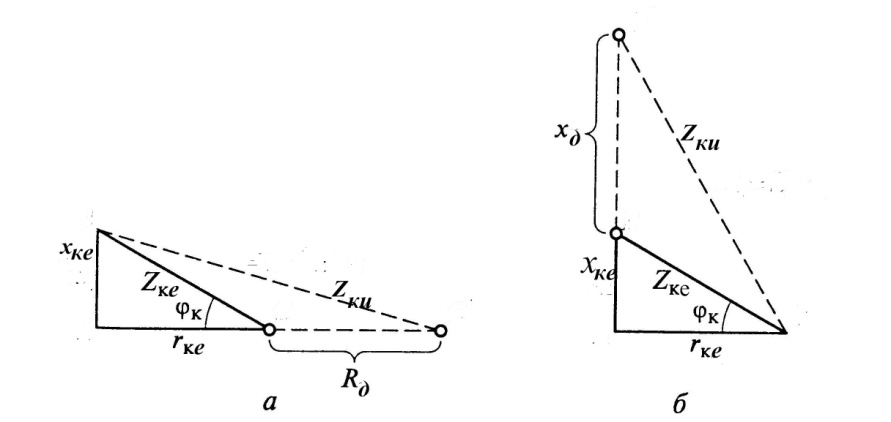
Рис.4.24. Треугольники пусковых сопротивлений при включении в цепь статора асинхронного двигателя: а – активного сопротивления;
б – индуктивного сопротивления.
индуктивное сопротивление 
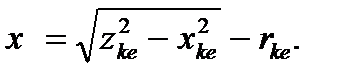
Из треугольника сопротивлений (рис.4.25, а) имеем
 (4.76)
(4.76)
Аналогично определяем значение добавочного индуктивного
сопротивления (рис.4.24, б):
 (4.77)
(4.77)
Механические и электромеханические характеристики двигателя при введении добавочных сопротивлений рассмотрены ранее.
Пусковая диаграмма двигателя приведена на рис.4.25. Сопротивление или  отключают после разгона двигателя или в какой то момент времени, при котором скачок тока не превышает .
отключают после разгона двигателя или в какой то момент времени, при котором скачок тока не превышает .
Ограничение пусковых токов асинхронных двигателей возможно и включением добавочных резисторов в цепь ротора [4]. При пуске асинхронного двигателя с фазным ротором с замкнутыми накоротко кольцами пусковой момент равен (0,5... 1,5) , а ток статора и ротора превосходит номинальный в 5... 10 раз.
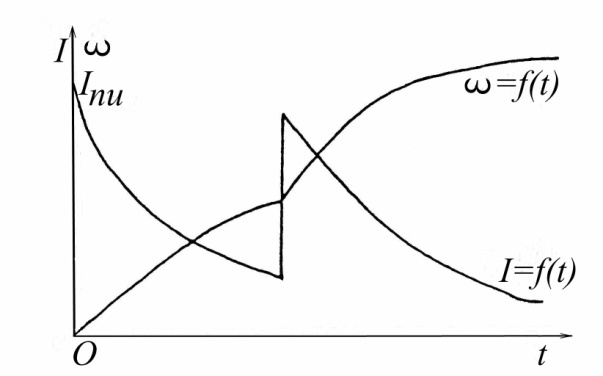
Рис.4.25. Диаграммы тока пуска асинхронного двигателя с
помощью резистора в цепи статора.
Введение в цепь ротора активных сопротивлений снижает токи двигателя и увеличивает пусковой момент до  (см. рис.4.7). Схемы включения ступеней пусковых резисторов приведены на рис.4.2, 6.
(см. рис.4.7). Схемы включения ступеней пусковых резисторов приведены на рис.4.2, 6.
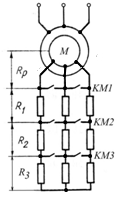
Рис. 4.26. Схемы включения пусковых резисторов асинхронного
двигателя.
4.11. Расчет пусковых резисторов для асинхронных двигателей
Расчеты пусковых резисторов для асинхронных двигателей с фазным ротором аналогичны расчетам пусковых резисторов для шунтовых и сериесных двигателей [18]. При этом необходимо учесть, что на рабочей части механической характеристики асинхронного двигателя момент пропорционален току, поэтому расчеты ведут для моментов, а не для тока [4]. Значение максимального пускового момента ограничивается динамическими усилиями в обмотках и нагревом машины. В некоторых случаях этот момент ограничивается требованиями технологии. Расчет сопротивлений пусковых резисторов можно выполнить точными и приближенными методами аналитическим и графическим методом. Рассмотрим приближенный метод, который применяют при максимальных моментах переключения, не превышающих 0,7  Диаграмма пуска асинхронного двигателя в две ступени приведена на рис.4.28.
Диаграмма пуска асинхронного двигателя в две ступени приведена на рис.4.28.
|
|
|
Аналитический метод. Если число ступеней m задано, то
кратность моментов переключения
 (4.78)
(4.78)
где  - максимальное сопротивление роторной цепи в момент включения,
- максимальное сопротивление роторной цепи в момент включения,  ; масштаб сопротивления
; масштаб сопротивления
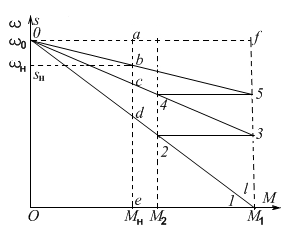
Рис.4.28. Пусковая диаграмма асинхронного двигателя.  ,
,  - сопротивление ротора,
- сопротивление ротора,  аb
аb 
После подстановки значений  и
и 
 (4.79)
(4.79)
Отрезок ab =  , а размер отрезка определим из подобных
, а размер отрезка определим из подобных
треугольников Oad и ofl:
аd/ao = lf/of;
отрезки аО = ; lf = 1; jf =  , следовательно:
, следовательно:
аd = ао lf/of =  ;
;  .
.
Таким образом, 
Значение  должно быть больше
должно быть больше  , т.е.
, т.е.  . По аналогии с машинами постоянного тока (глава 2 и 3)
. По аналогии с машинами постоянного тока (глава 2 и 3)
определим сопротивление:
 (4.80)
(4.80)
Когда число ступеней не задано, принимаем значения моментов переключения и  , затем определяем
, затем определяем  и число ступеней m:
и число ступеней m:
 (4.81)
(4.81)
Полученное число ступеней округляем до целого и уточняем значение . Далее расчет выполняем, как в первом случае.
Графический метод. Порядок построения пусковых
характеристик такой же, как и для машин постоянного тока параллельного возбуждения. Сначала по паспортным данным машины строим естественную механическую характеристику  = f(M) и задаемся моментами переключения
= f(M) и задаемся моментами переключения  и
и  (рис.4.28). Строим пусковую характеристику: проводим линию 1 – 2 - 0 до пересечения в точке 2, затем 3 – 4 - 0 и т.д. до совпадения я точке 5 (момент )на естественной характеристике. На линии номинального момента определяем значения сопротивлений ступеней резисторов:
(рис.4.28). Строим пусковую характеристику: проводим линию 1 – 2 - 0 до пересечения в точке 2, затем 3 – 4 - 0 и т.д. до совпадения я точке 5 (момент )на естественной характеристике. На линии номинального момента определяем значения сопротивлений ступеней резисторов:
 (4.82)
(4.82)
где  ,
,  - номинальные значения ЭДС и тока ротора.
- номинальные значения ЭДС и тока ротора.
Для проверки, необходимо определить сопротивление ротора и сравнить его с полученным графическим методом
 (4.83)
(4.83)
|
|
|
4.12. Электроприводы с линейными электродвигателями
В настоящее время около 40-50% серийных электродвигателей эксплуатируется в производственных механизмах с поступательным или возвратно-поступательным движением рабочего органа. Для преобразования вращательного движения в поступательное используются разнообразные устройства: пневмо- и гидропередача, пара «винт - гайка»; кривошипно-шатунный механизм, шестерня и рейка, колесо и путевая структура в транспортных системах и др. Кроме того, в таких приводах, как правило, используются редукторы, являющиеся местом дополнительных потерь и отказов.
Линейные электродвигатели позволяют непосредственно осуществить поступательное движение без механического контакта между первичной (обычно статором) и вторичной (ротором) структурами, следовательно, исключить передаточный механизм. При этом значительно упрощается кинематическая схема, повышается надежность, точность управления, а сами линейные электродвигатели хорошо пристраиваются к исполнительному механизму, обладают технологичностью в производстве и меньшим расходом стали благодаря малоотходному раскрою.
На практике применяются линейные двигатели постоянного тока (в основном - шаговые), асинхронные (ЛАД), синхронные (ЛСД) и электромагнитные (ЛЭМД). Получают распространение линейные асинхронные двигатели в силу их конструктивной простоты, дешевизны, технологичности изготовления, надежности, разнообразия конструктивных решений. Конструктивно ЛАД выполняют цилиндрическими и плоскими.
На рис.4.29 показано устройство плоского ЛАД.
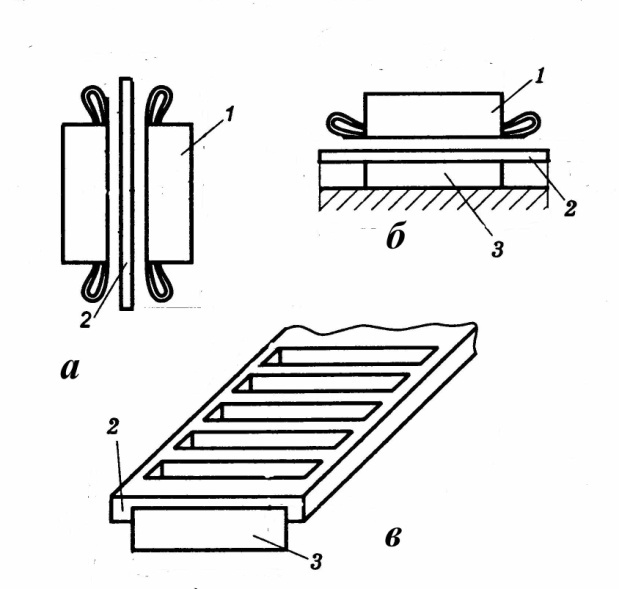
Рис.4.29. Устройство плоских линейных асинхронных двигателей:
1-индуктор с обмоткой (статор); 2- реактивная шина; 3- обратный магнитопровод; а – двухсторонний ЛАД; б – односторонний ЛАД; в – короткозамкнутая обмотка с обратным магнитопроводом.
Управление параметрами движения ЛАД осуществляют так же, как и обычным АД: изменением сопротивления реактивной шины, регулированием частоты и длительности включений. ЛАД применяются в конвейрах, ворошителях бункеров-питателей сыпучих грузов, транспортных средствах, ручном инструменте и т.п. Важным преимуществом ЛАД состоит в высоком значении  .
.
|
|
|
