 |


Переходные процессы в электроприводах
|
|
|
|
Общие сведения
Переходным процессом электропривода называют режим работы при переходе от одного установившегося состояния привода к другому, когда изменяются частота вращения, момент, и ток. Причинами возникновения переходных процессов в электроприводах являются либо изменение нагрузки, связанное с производственным процессом, либо внешнее воздействие на электропривод при управлении им, т. е. пуск, торможение, изменение направления вращения и т.п. Без переходных процессов не совершается работа ни одного электропривода. Даже в простейших нерегулируемых приводах требуется осуществлять пуск, остановку, реверсирование, которые являются наиболее характерными переходными процессами. Пуск и торможение могут быть основными рабочими состояниями, например в электроприводе строгального станка, насоса безбашенной
водокачки и т.п.
Переходные процессы в электроприводах могут возникнуть также в результате аварий или нарушения нормальных условий электроснабжения (например, изменение напряжения или частоты сети, несимметрия напряжения и т.п.).
Изучение переходных процессов электропривода имеет большое практическое значение. Правильный выбор мощности электродвигателей, правильный подбор аппаратов и расчет схем управления, уменьшение расхода энергии при пуске и торможении основаны на знании переходных режимов электроприводов.
Лишь для ограниченного числа исполнительных механизмов можно проектировать электроприводы без учета характера протекания переходных процессов. К ним относятся некоторые редко пускаемые и длительно работающие механизмы с простейшими пусковыми устройствами. Для большинства же рабочих машин характер протекания переходных процессов должен учитываться, так как он оказывает существенное влияние на работу привода.
Для увеличения производительности механизма необходимо не только выбрать оптимальное значение номинальной частоты вращения, но и стремиться к сокращению длительности переходных режимов привода.
Изучение переходных процессов и влияния на них различных электрических и механических параметров, например напряжения, сопротивления, индуктивности, махового момента и т. п., необходимо также для правильного выбора способов управления и расчета схем управления [16].
Значение расхода энергии в периоды пуска и торможения имеет особенно существенное значение для часто пускаемых приводов. Поэтому при расчете переходных режимов следует выбирать экономически целесообразные параметры привода и пытаться уменьшить расход энергии при пусковых и тормозных процессах. Переходные процессы в электроприводе характеризуются переходными механическими, электромагнитными и тепловыми процессами, действующими одновременно и взаимно связанными между собой.
При быстро протекающих процессах изменение теплового состояния электропривода в большинстве случаев не оказывает существенного влияния на другие виды переходных процессов. Поэтому в дальнейшем при изучении переходных процессов в электроприводах изменение теплового состояния двигателя не учитывают.
Внешней причиной, или возмущающим воздействием, вызывающим переходный процесс в электроприводе, могут быть резкие изменения питающего напряжения, механической нагрузки на валу, сопротивления в цепях двигателя.
Электрическая реакция привода на возмущающее воздействие, быстрота и характер переходного процесса зависят от инерционности энергетического машинного устройства.
Запас кинетической энергии в механических звеньях устройства и электромагнитной энергии в элементах его электрических целей не может изменяться мгновенно, поэтому переходные процессы требуют определенного времени,
Когда изменение кинетической энергии в одних элементах вызывает изменение электромагнитной энергии в других, может наступить периодическое преобразование одного вида энергии в другой и характер переходного процесса будет колебательный.
Переходные процессы в электроприводах в общем случае, если учитывать все инерционности, представляют сложное явление. Электромагнитные переходные процессы учитывают при расчете приводов с двигателями постоянного тока большой мощности.
В электроприводах с асинхронными двигателями электромагнитные переходные процессы, связанные с электромагнитной инерционностью, быстротечны и в практических расчетах их влиянием можно пренебречь.
В зависимости от того, какой вид инерции учитывают, переходные процессы электропривода условно делят на механические, т.е. такие, при рассмотрении которых принимают во внимание влияние только механической инерции, и электромеханические, где учитывают влияние не только механической, но и электромагнитной инерции.
6. 2. Механические переходные процессы
Расчеты механических переходных процессов выполняют на
|
|
|
|
|
|
основе уравнения движения электропривода:
 (6.1)
(6.1)
Чтобы определить продолжительность переходного процесса,
разделим переменные
 (6.2)
(6.2)
Проинтегрировав обе части равенства (6.2), получим, что
 (6.3)
(6.3)
где  ,
,  - начальное и конечное значения угловой скорости.
- начальное и конечное значения угловой скорости.
В приближенных расчетах динамический момент (М -  ) и момент инерции считают постоянными величинами, тогда
) и момент инерции считают постоянными величинами, тогда
 (6.4)
(6.4)
При разгоне из неподвижного состояния, когда  ,
,  =
=  продолжительность разгона (пуска)
продолжительность разгона (пуска)
 (6.5)
(6.5)
Если осуществляется полная остановка от номинальной частоты вращения, то продолжительность торможения
 (6.6)
(6.6)
При искусственном торможении
 , (6.7)
, (6.7)
где  - дополнительный тормозной момент.
- дополнительный тормозной момент.
В тех случаях, когда из-за сложного характера изменения вращающего или статического момента динамический момент нельзя считать постоянным, пользуются графоаналитическим методом определения продолжительности пуска [14]. Построив механические характеристики двигателя 1 (рис.6.1) и рабочей машины 2, строят кривую изменения динамического момента 3.
|
|
|
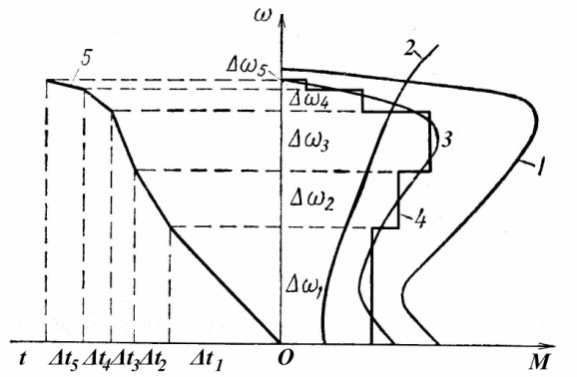
Рис.6.1. Построение графика изменения частоты вращения электро
привода при пуске.
Кривую динамического момента заменяют ломаной ступенчатой линией 4. В пределах каждой ступени динамический момент принимают постоянным, равным среднему значению его на этом участке.
Для каждого участка время разгона
 (6.8)
(6.8)
где  - средний динамический момент на участке.
- средний динамический момент на участке.
Определив продолжительность разгона на участках, сложением можно найти полную продолжительность пуска и построить график изменения частоты вращения электропривода при пуске 5.
Для двигателей, имеющих линейную зависимость момента от частоты вращения в течение переходного процесса и постоянный момент сопротивления, формулы для расчетов можно получить из следующей системы уравнений:
Подставляя в уравнение (6.9) значения из формул (6.10), (6.11), (6.12), получим
 (6.13)
(6.13)
Разделив на М/s все члены последнего уравнения, будем иметь
 (6.14)
(6.14)
Величину J  /
/  выражаемую в секундах, называют электромеханической постоянной времени переходных процессов.
выражаемую в секундах, называют электромеханической постоянной времени переходных процессов.
Обозначив постоянную времени  , уравнение (6.14) запишем в виде:
, уравнение (6.14) запишем в виде:
 (6.15)
(6.15)
где  - скольжение двигателя, соответствующее моменту
- скольжение двигателя, соответствующее моменту
сопротивления  .
.
Поскольку моменты прямо пропорциональны скольжению, последнее уравнение можно записать в виде:
 (6.16)
(6.16)
отсюда
 (6.17)
(6.17)
Проинтегрировав обе части последнего равенства в пределах изменения момента от  до
до  , получим уравнение для определения продолжительности переходного процесса:
, получим уравнение для определения продолжительности переходного процесса:
 (6.18)
(6.18)
Переходный процесс считают закончившимся, если конечное скольжение или момент отличается от установившегося значения на 2... 5%.
Из расчетов по формуле (6.18) следует, что переходный процесс при
таком условии заканчивается за время, равное (3...4) .
6. 3. Переходные процессы при резкопеременной нагрузке
Нагрузка некоторых машин, например дробилок, прессов, молотилок, представляет собой чередующиеся периоды кратковременного резкого повышения и снижения нагрузки. Эти машины конструируют таким образом, чтобы большие, в течение долей секунды действующие сопротивления преодолевались в основном инерционными силами. При этом нагрузочная диаграмма двигателя существенно отличается от нагрузочной диаграммы рабочей машины (рис.6.2). При большой нагрузке момент двигателя меньше статического, а при малой больше. Среднее значение момента двигателя равно среднему значению статического момента. Выравнивание момента двигателя тем больше, чем больше момент инерции энергетического машинного устройства, поэтому при наличии резкопеременной, которую также называют ударной, нагрузке, привод снабжают маховиком или делают массивными движущие рабочие органы.
|
|
|
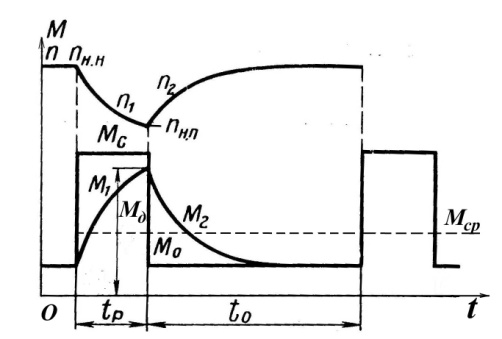
Рис. 6.2. Изменение момента электродвигателя при резкопеременной нагрузке рабочей машины: 1- нагрузочная диаграмма двигателя; 2 – нагрузочная диаграмма рабочей машины.
Необходимый приведенный момент инерции можно определить, вычислив предварительно электромеханическую постоянную времени переходных процессов
 (6.19)
(6.19)
где  - продолжительность действия большой нагрузки
- продолжительность действия большой нагрузки  .
.
В то же время,
 (6.20)
(6.20)
Из уравнений (6.19), (6.20)
 (6.21)
(6.21)
Если собственный приведенный момент инерции энергетического машинного устройства  оказывается меньше вычисленного, то устанавливают маховик с моментом инерции
оказывается меньше вычисленного, то устанавливают маховик с моментом инерции  , принимая
, принимая  = J -
= J -  .
.
В приводах машин с резкопеременной нагрузкой применяют двигатели, у которых большое скольжение  , так как это позволяет
, так как это позволяет
уменьшить .
Поскольку
 ,
,  ,
,
то уравнение для определения приведенного момента инерции можно записать в таком виде:
 (6.22)
(6.22)
Значения  и
и  берут из графика нагрузки (рис. 6.2). Значение момента электродвигателя к концу действия большой нагрузки принимают равной 0,75
берут из графика нагрузки (рис. 6.2). Значение момента электродвигателя к концу действия большой нагрузки принимают равной 0,75 
Уравнение для вычисления момента двигателя при ударной нагрузке можно получить из выражения (6.20), определяя из него . Алгебраическими преобразованиями и потенцированием логарифмической функции получают выражение:
 (6.23)
(6.23)
Момент электродвигателя изменяется по экспоненциальным кривым, как показано на рис. 6.2.
Для определения момента двигателя на втором участке в формулу (6.23) подставляют соответствующие значения  и , а именно
и , а именно
 ,
,  =
=  .
.
|
|
|
