 |


Влияние изменения частоты тока питающей сети
|
|
|
|
на работу АД
Изменение частоты питающей сети наблюдается при значительных колебаниях нагрузки в сетях с источником электроснабжения ограниченной мощности (при питании от резервной электростанции). В приводах частоту тока сети изменяют с целью регулирования частоты вращения или поддержания ее на заданном уровне [19]. При изменении частоты тока сети двигатель переходит на искусственную механическую характеристику. Частота вращения поля статора при изменении частоты от  до
до  :
:
 (4.48)
(4.48)
отсюда 
Синхронная частота вращения изменяется прямо
пропорционально изменению частоты сети. Определим характер изменения критического момента и критического скольжения. Для простоты пренебрегаем значением активного сопротивления статора  .
.
Тогда выражение (4.14) будет иметь вид:
 (4.49)
(4.49)
Значение критического момента изменяется обратно пропорционально квадрату частоты. Для частот  и , взяв соответственно отношение
и , взяв соответственно отношение  и
и  , получим:
, получим:
 . (4.50)
. (4.50)
Для критического момента асинхронного двигателя при 
 . (4.51)
. (4.51)
т.е. значение критического скольжения изменяется обратно пропорционально частоте. Пересчитать скольжение с одной частоты на другую можно, если взять отношение  и
и 
 . (4.52)
. (4.52)
Значение изменения частоты вращения 
для разных частот тока:
 . (4.53)
. (4.53)
Если пренебречь изменением  и
и  в двигателе при
в двигателе при
изменении частоты, то  будет иметь постоянное значение. Искусственные механические характеристики АД строят по выражению (4.19) или (4.20), для которых определяют
будет иметь постоянное значение. Искусственные механические характеристики АД строят по выражению (4.19) или (4.20), для которых определяют  и . Задавшись значением s от 1 до нуля, рассчитывают искусственную механическую характеристику (рис.4.8).
и . Задавшись значением s от 1 до нуля, рассчитывают искусственную механическую характеристику (рис.4.8).
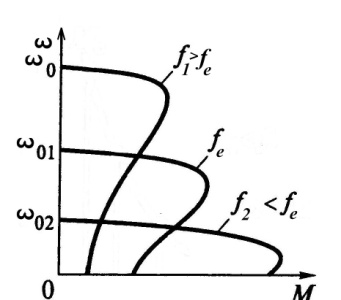
Рис. 4.8. Механические характеристики АД при изменении частоты.
4.9. Тормозные режимы асинхронных двигателей
Асинхронные двигатели, как и машины постоянного тока, обратимы и могут преобразовывать электрическую энергию в механическую (двигательный режим) и наоборот преобразовывать механическую энергию в электрическую (генераторный режим). Режим генераторного (рекуперативного) торможения происходит с отдачей энергии в сеть. Он возможен при частоте вращения ротора асинхронного двигателя выше синхронной ( >
>  ).
).
Скольжение s = ( -
-  )/ < 0 отрицательно, следовательно, в выражении момента двигателя знак изменяется:
)/ < 0 отрицательно, следовательно, в выражении момента двигателя знак изменяется:
|
|
|
 . (4.54)
. (4.54)
Рассмотрим особенности этого режима:
1) критическое скольжение не изменяется по значению, но меняется по знаку:
 . (4.55)
. (4.55)
2) критический момент (4.14) будет больше критического момента  в двигательном режиме:
в двигательном режиме:
 . (4.56)
. (4.56)
З) в двигательном режиме активная мощность
(из схемы замещения)
 . (4.57)
. (4.57)
При любом s > 0  > 0. Активная мощность потребляется из сети и преобразуется в механическую.
> 0. Активная мощность потребляется из сети и преобразуется в механическую.
При рекуперативном торможения при s < 0
 (4.58)
(4.58)
Активная мощность изменяет свой знак. Механическая энергия, подведенная с вала рабочей машины, преобразуется в электрическую и отдается в сеть за вычетом потерь в электродвигателе.
Выясним характер изменения реактивной мощности:
 (4.59)
(4.59)
При любом значении скольжения знак  не изменяется. В режиме рекуперативного торможения реактивная мощность создает необходимое магнитное поле статора для возбуждения асинхронного
не изменяется. В режиме рекуперативного торможения реактивная мощность создает необходимое магнитное поле статора для возбуждения асинхронного
двигателя.
Механическую характеристику асинхронного двигателя строят по выражению (4.9). Характеристика располагается в четвертом или втором квадранте системы координат (рис.4.2).
Рекуперативное торможение возможно в следующих случаях:
1) при работе с активным моментом подъемно-транспортных машин (кранов, кран-балок, лебедок и т.д.). Допустим, лебедка поднимает груз со скоростью v. Момент сопротивления, создаваемый грузом, равен  (рис.4.10). В какой-то момент времени двигатель реверсируют. Следовательно, он перейдет на другую характеристику, из точки 1 в точку 2. Под действием сил инерции в первый момент времени ротор двигателя вращается с частотой вращения
(рис.4.10). В какой-то момент времени двигатель реверсируют. Следовательно, он перейдет на другую характеристику, из точки 1 в точку 2. Под действием сил инерции в первый момент времени ротор двигателя вращается с частотой вращения  (груз поднимается). Но так как
(груз поднимается). Но так как  , то и
, то и  < 0. Следовательно, груз тормозится и в точке 3 останавливается в верхнем положении, а затем под действием и
< 0. Следовательно, груз тормозится и в точке 3 останавливается в верхнем положении, а затем под действием и  начинает опускаться. В точке 4 = 0, но под действием груза электродвигатель разгоняется до точки 5,
начинает опускаться. В точке 4 = 0, но под действием груза электродвигатель разгоняется до точки 5,
|
|
|
где  . Груз опускается со скоростью
. Груз опускается со скоростью  , электрический двигатель находится в режиме рекуперативного торможения.
, электрический двигатель находится в режиме рекуперативного торможения.
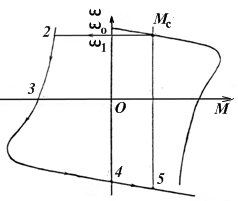
Рис. 4.10. Рекуперативное торможение асинхронного
двигателя при опускании груза.
Потенциальная энергия поднятого груза преобразуется в электрическую и отдается в сеть за вычетом потерь;
2) при переходе многоскоростного двигателя с высокой частоты вращения на низкую. Допустим, двухскоростной двигатель работает с моментом в точке 1 на второй частоте вращения (рис.4.11). Если отключить вторую частоту вращения и включить первую, то электродвигатель перейдет в точку 2 характеристики первой частоты вращения. В этом случае  , и двигатель находится в режиме рекуперативного торможения. Запасенная двигателем и рабочей машиной кинетическая энергия преобразуется в электрическую и отдается в сеть. А с уменьшением запаса кинетической энергии снижается и частота вращения, двигатель тормозится и переходит в точку З характеристики, где
, и двигатель находится в режиме рекуперативного торможения. Запасенная двигателем и рабочей машиной кинетическая энергия преобразуется в электрическую и отдается в сеть. А с уменьшением запаса кинетической энергии снижается и частота вращения, двигатель тормозится и переходит в точку З характеристики, где  ;
;
3) при горячей обкатке ДВС после ремонта. Эта операция осуществляется в ремонтных мастерских и гаражах с помощью асинхронного двигателя с фазным ротором. В цепь ротора включают регулируемые резисторы. После окончания холодной обкатки выполняют горячую. С этой целью подают топливо в ДВС и запускают его. Постепенно увеличивают частоту вращения двигателя выше и асинхронный двигатель переводят в режим рекуперативного торможения. Регулируя значение сопротивления добавочного резистора в цепи ротора, изменяют загрузку ДВС и его частоту вращения [21].
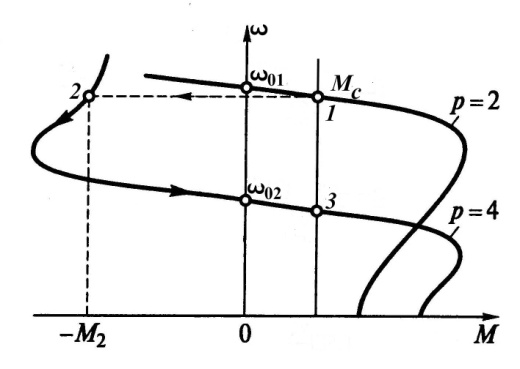
Рис. 4.11. Рекуперативное торможение асинхронного двигателя при
переключении частоты вращения.
Режим противовключения. Этот режим возникает в тех случаях, когда под действием внешних сил (активного момента рабочей машины или сил инерции) двигатель вращается в обратную сторону (против включения). Рассмотрим эти случаи более подробно:
|
|
|
1) асинхронный двигатель с фазным ротором приводит в движение лебедку, поднимающую груз (момент сопротивления ). Подъем идет со скоростью  (рис.4.12). Вводим в цепь ротора добавочное активное сопротивление
(рис.4.12). Вводим в цепь ротора добавочное активное сопротивление  , и двигатель переходит на искусственную механическую характеристику из точки 1 в точку 2. При введении сопротивления момент двигателя уменьшается до значения
, и двигатель переходит на искусственную механическую характеристику из точки 1 в точку 2. При введении сопротивления момент двигателя уменьшается до значения  , который меньше . Двигатель тормозится. В точке З двигатель остановится, но
, который меньше . Двигатель тормозится. В точке З двигатель остановится, но  и под действием груза двигатель начнет вращаться в обратную сторону. Таким образом, асинхронный двигатель перевели в тормозной режим противовключения. в точке 4
и под действием груза двигатель начнет вращаться в обратную сторону. Таким образом, асинхронный двигатель перевели в тормозной режим противовключения. в точке 4  , груз будет опускаться с постоянной угловой скоростью
, груз будет опускаться с постоянной угловой скоростью 
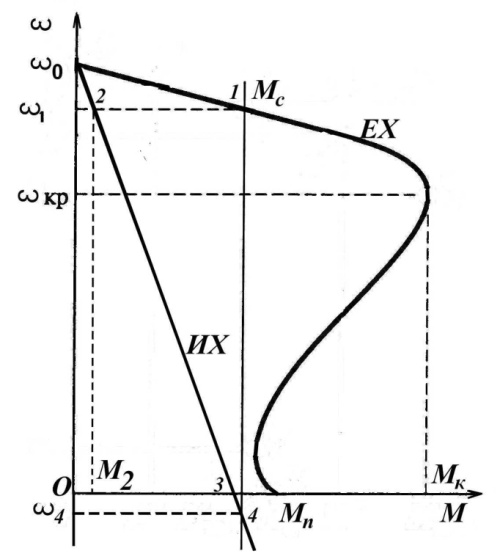
Рис.4.12. Режим противовключения асинхронного двигателя при
активном моменте.
2) асинхронный двигатель работает с рабочей машиной с угловой скоростью  . Предположим, что в какой-то момент времени мы осуществили реверс этого двигателя. Следовательно, он переходит на другую механическую характеристику (рис.4.13). Под действием сил инерции в первый момент времени частота вращения агрегата не изменяется, и двигатель переходит из точки 1 прямого вращения ротора в точку 2 обратного вращения.
. Предположим, что в какой-то момент времени мы осуществили реверс этого двигателя. Следовательно, он переходит на другую механическую характеристику (рис.4.13). Под действием сил инерции в первый момент времени частота вращения агрегата не изменяется, и двигатель переходит из точки 1 прямого вращения ротора в точку 2 обратного вращения.
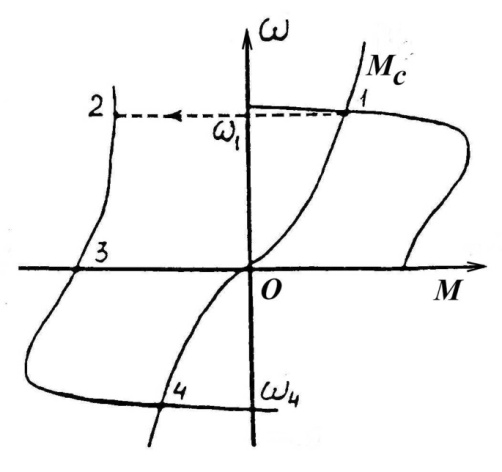
Рис.4.13. Реверсирование асинхронного двигателя
В точке 2 знаки момента и скорости разные, следовательно, режим работы - тормозной. При таком движущем моменте двигателя знак скорости должен быть отрицательным, а он положительный, значит, от точки 2 до точки З имеет место режим противовключения. Механические характеристики асинхронного двигателя в режиме противовключения располагаются во втором или в четвертом квадранте.
Рассмотрим особенности работы асинхронного двигателя в режиме противовключения. Прежде всего необходимо отметить, что если двигатель перевели в режим торможения, то преобразованная механическая мощность от рабочей машины или энергия сил инерции поступает в ротор, т.к.  для первого случая и
для первого случая и  =
=  - для второго. Электрическую мощность, поступающую из сети, можно определить по выражению
- для второго. Электрическую мощность, поступающую из сети, можно определить по выражению
 (4.60)
(4.60)
|
|
|
В режиме противовключения s > 1, так как

Знак электромагнитной мощности не изменяется. Это говорит о том, что и сетевая активная мощность идет в ротор. Таким образом, в ротор асинхронного двигателя по двум каналам поступает энергия, которая расходуется в его сопротивлениях. Значение суммарной мощности велико, и двигатель может быстро нагреться выше допустимой температуры. Для ограничения этого нагрева режим противовключения должен протекать кратковременно (при реверсе) или необходимы специальные меры: включение добавочных сопротивлений в цепь ротора, чтобы ограничить ток двигателя и вывести потери за
пределы обмоток двигателя.
Для определения характера изменения тока и момента двигателя в режиме противовключения представим электромагнитный момент двигателя в следующем виде:
 (4.61)
(4.61)
где  - постоянный коэффициент, определяемый конструкцией двигателя;
- постоянный коэффициент, определяемый конструкцией двигателя;  - магнитный поток двигателя, пропорциональный напряжению сети;
- магнитный поток двигателя, пропорциональный напряжению сети;  - ток ротора;
- ток ротора;  – угол сдвига фаз тока и ЭДС ротора;
– угол сдвига фаз тока и ЭДС ротора;  - активная составляющая тока ротора.
- активная составляющая тока ротора.
Ток ротора
 (4.62)
(4.62)
где  – действующее значение ЭДС ротора;
– действующее значение ЭДС ротора;  ;
;
 - индуктивное сопротивление ротора,
- индуктивное сопротивление ротора, 
 - ЭДС и сопротивление при s = 1.
- ЭДС и сопротивление при s = 1.
При работе в режиме противовключения s 
Таким образом, в режиме противовключения ток ротора и статора при s  стремятся к постоянному значению. Активная
стремятся к постоянному значению. Активная
составляющая тока ротора:
 (4.63)
(4.63)
При увеличении частоты вращения в режиме противовключения
(s  ) активная составляющая тока ротора и момент двигателя стремятся к нулю. Действительно, и по уравнению механической
) активная составляющая тока ротора и момент двигателя стремятся к нулю. Действительно, и по уравнению механической
характеристики
 (4.64)
(4.64)
при s  электромагнитный момент будет уменьшаться до нуля.
электромагнитный момент будет уменьшаться до нуля.
Режим динамического торможения асинхронных двигателей осуществляется с независимым возбуждением и с самовозбуждением. В режиме динамического торможения с независимым возбуждением обмотку статора отключают от сети переменного тока и подают в нее постоянный ток. При этом обмотка статора создает постоянный магнитный поток, который пересекает вращающаяся обмотка ротора. Последняя включена на добавочное сопротивление или замкнута накоротко. В обмотке ротора наводится переменная ЭДС  и появляется ток , как и в обычном генераторе, только нагрузкой здесь служит сопротивление цепи ротора. Ток взаимодействует с постоянным магнитным полем статора и создает тормозной момент. С уменьшением скорости снижаются ЭДС, ток и момент. При остановленном роторе тормозной момент равен нулю. Значение тока
и появляется ток , как и в обычном генераторе, только нагрузкой здесь служит сопротивление цепи ротора. Ток взаимодействует с постоянным магнитным полем статора и создает тормозной момент. С уменьшением скорости снижаются ЭДС, ток и момент. При остановленном роторе тормозной момент равен нулю. Значение тока
ротора асинхронного двигателя
 (4.65)
(4.65)
где  – ЭДС ротора двигателя,
– ЭДС ротора двигателя, 
где v - относительное значение частоты вращения,  ;
;
|
|
|
- значение ЭДС ротора при синхронной частоте вращения .
Пренебрегая эффектом вытеснения тока в обмотке ротора, считаем постоянным значение его активного сопротивления  .
.
Индуктивное сопротивление
 .
.
Принимаем постоянной индуктивность обмотки ротора  . Частоту тока ротора
. Частоту тока ротора  представим в виде
представим в виде
 (4.66)
(4.66)
где  - частота тока ротора при синхронной частоте вращения, для отечественных двигателей = 50Гц. Индуктивное сопротивление
- частота тока ротора при синхронной частоте вращения, для отечественных двигателей = 50Гц. Индуктивное сопротивление
 График изменения индуктивного сопротивления приведен на рис.4.14.
График изменения индуктивного сопротивления приведен на рис.4.14.
С учетом сказанного ток ротора можно записать в виде
 (4.67)
(4.67)
Тормозной момент, как и двигательный, создается активной
составляющей тока :
 (4.68)
(4.68)
При изменении частоты вращения ротора от нуля до бесконечности активная составляющая имеет максимум. Частота вращения, при
которой будет этот максимум:

Дробь равна нулю, если числитель ее равен нулю, т.е.

Решаем это уравнение относительно v
 v (4.69)
v (4.69)
Рассмотрим график изменения сопротивлений  и
и  на рис. 4.14.
на рис. 4.14.
Для анализа влияния значения сопротивления в цепи ротора асинхронного двигателя на тормозной момент необходимо выполнить построения, представленные на рис. 4.14.
Из подобных треугольников АОВ и СОД имеем соотношения:
 или
или  откуда АВ =
откуда АВ = 
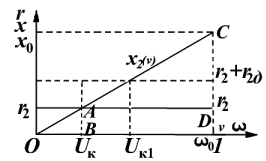
Рис. 4.14. График изменения сопротивлений в роторной цепи при
динамическом торможении асинхронного двигателя.
Следовательно, АВ =  . Из графика и выражения (4.70) видно, что максимальное значение динамического момента наступает при равенстве активного и индуктивного сопротивлений в цепи ротора. Необходимо отметить, что на синхронной частоте вращения значение индуктивного сопротивления значительно больше активного сопротивления обмоток ротора. Поэтому максимальное значение динамического момента находится на частоте вращения
. Из графика и выражения (4.70) видно, что максимальное значение динамического момента наступает при равенстве активного и индуктивного сопротивлений в цепи ротора. Необходимо отметить, что на синхронной частоте вращения значение индуктивного сопротивления значительно больше активного сопротивления обмоток ротора. Поэтому максимальное значение динамического момента находится на частоте вращения  , близкой к нулю. При включении добавочного сопротивления
, близкой к нулю. При включении добавочного сопротивления  в ротор значение частоты
в ротор значение частоты
вращения увеличивается. Определим значение максимальной составляющей тока двигателя при :
 (4.70)
(4.70)
Максимальное значение активной составляющей тока ротора зависит от ЭДС  , которое в свою очередь определяется для данного двигателя значением потока возбуждения (постоянного тока). График изменения активной составляющей тока ротора (в другом масштабе это график динамического торможения) приведен на рис.4.15.
, которое в свою очередь определяется для данного двигателя значением потока возбуждения (постоянного тока). График изменения активной составляющей тока ротора (в другом масштабе это график динамического торможения) приведен на рис.4.15.

Рис.4.15. Механические характеристики асинхронного двигателя в
режиме динамического торможения.
Пусть двигатель работает с частотой вращения  . Отключаем его от сети переменного тока и подаем в цепь статора постоянный ток
. Отключаем его от сети переменного тока и подаем в цепь статора постоянный ток  . Возникает тормозной момент, и двигатель переходит в точку 2 характеристики динамического торможения. При снижении частоты вращения момент вначале растет, достигает
. Возникает тормозной момент, и двигатель переходит в точку 2 характеристики динамического торможения. При снижении частоты вращения момент вначале растет, достигает  , затем уменьшается до нуля. Выражения (4.69…4.71) дают представление о качественном изменении механических характеристик асинхронных двигателей. Этими выражениями трудно пользоваться для построения реальных механических характеристик, так как часто неизвестны параметры
, затем уменьшается до нуля. Выражения (4.69…4.71) дают представление о качественном изменении механических характеристик асинхронных двигателей. Этими выражениями трудно пользоваться для построения реальных механических характеристик, так как часто неизвестны параметры  . Для вывода расчетных формул механических характеристик в режиме динамического торможения постоянный ток, подаваемый в статор, заменяют эквивалентным переменным. И далее рассматривают работу как обычной асинхронной машины. Аналитическое выражение механической характеристики асинхронного двигателя в режиме динамического торможения имеет вид:
. Для вывода расчетных формул механических характеристик в режиме динамического торможения постоянный ток, подаваемый в статор, заменяют эквивалентным переменным. И далее рассматривают работу как обычной асинхронной машины. Аналитическое выражение механической характеристики асинхронного двигателя в режиме динамического торможения имеет вид:
 (4.71)
(4.71)
где  ;
;  ,
,  - индуктивные сопротивления намагничивающего контура статора и обмотки ротора; - переменный ток статора, определяемый из равенства намагничивающих сил постоянного и переменного потоков
- индуктивные сопротивления намагничивающего контура статора и обмотки ротора; - переменный ток статора, определяемый из равенства намагничивающих сил постоянного и переменного потоков  =
=  .
.
С учетом сопротивления обмотки статора относительное
значение критической частоты вращения можно записать в виде
 (4.72)
(4.72)
Соотношение постоянных и переменных токов в зависимости от схемы нужно выбрать в табл.4.1
Таблица 4.1
Соотношения значений сопротивлений и токов для различных схем
динамического торможения АД.
| Параметры | Схемы и значения параметров | |||
| Схемы включения обмоток |

|

|

|

|

| 2 
| 
|
| 
|
Соотношения токов  = =
|
1,23
|
1,41
|
2,12
|
2,45
|
Таким образом, изменение сопротивления в цепи статора приводит к изменению максимальных значений тормозного момента, а изменение сопротивления в цепи ротора - к изменению скольжения.


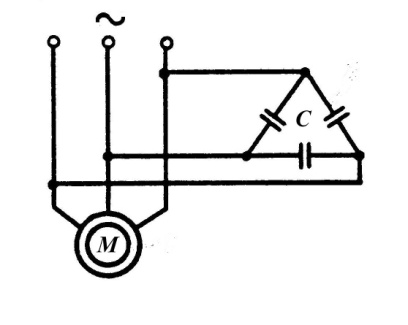
а б в
Рис.4.16. Схемы включения конденсаторов в режиме динамического торможения асинхронного двигателя с самовозбуждением.
Динамическое торможение с независимым возбуждением нашло применение в приводах, где требуются быстрая и точная остановка механизма, сокращение продолжительности переходного процесса в электроприводах. Оно имеет достоинства: потери а двигателе ниже, чем при противовключении; не требуется отключать двигатель при нулевой частоте вращения; обеспечивается точная остановка привода.
Динамическое торможение с самовозбуждением осуществляется с помощью конденсаторов. у работающего двигателя отключают от сети обмотку статора и подключают батарею конденсаторов по схеме (рис.4.16) [12]. Можно использовать бумажные и электролитические конденсаторы. Процесс самовозбуждения можно проследить по рис.4.17. Торможение при самовозбуждении основано на том, что после отключения АД от сети его электромагнитное поле затухает (исчезает не мгновенно) в течение некоторого, пусть и небольшого интервала времени. За счет энергии этого затухающего поля и использования специальных схем включения АД можно обеспечить его самовозбуждение и реализовать тормозной режим. На практике применение нашли так называемые конденсаторное и магнитное торможение АД. При конденсаторном торможении возбуждение АД осуществляется с помощью конденсаторов С, подключаемых к статору. Отметим, что конденсаторы могут подключаться к статору постоянно (глухое подключение) или с помощью дополнительного контактора, будучи при этом соединенными в схему треугольника или звезды.
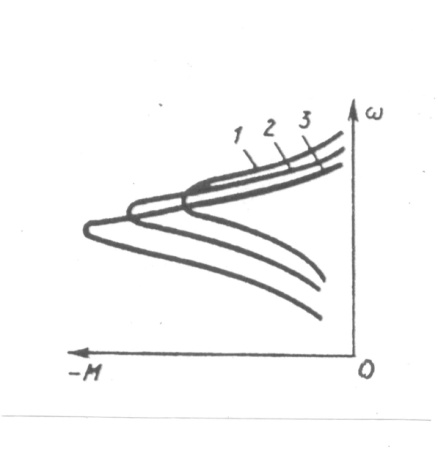
Рис.4.17. График изменения ЭДС и напряжения на конденсаторе
в зависимости от тока асинхронного двигателя.
Определяющий фактор, от которого зависят вид и расположение характеристик АД 1... 3(см. рис.4.18, а значит, интенсивность торможения - емкость конденсаторов С (кривые 1… 3соответствуют значениям  ). Чем она больше, тем больше будет максимум тормозного момента, а характеристики будут смещаться в область низких частот вращения АД.
). Чем она больше, тем больше будет максимум тормозного момента, а характеристики будут смещаться в область низких частот вращения АД.
Магнитное торможение реализуется после отключения статора двигателя от сети и замыкания с помощью контактов К его выводов накоротко (рис.4.19).
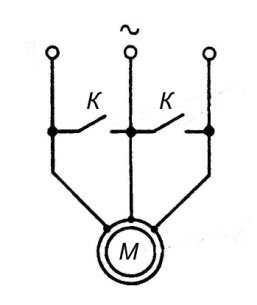
Рис.4.19. Схема магнитного торможения асинхронного двигателя.
За счет запасенной в двигателе электромагнитной энергии проходит самовозбуждение двигателя и на его валу создается тормозной момент. Особенностью такого торможения является быстротечность, определяемая небольшим временем затухания магнитного поля двигателя, однако возникающие при этом тормозные моменты достаточно велики и обеспечивают интенсивное торможение электропривода.
Тиристорные схемы существенно расширили практические возможности торможения АД, которые позволяют осуществлять как пуск двигателя, так и его торможение. Для обеспечения интенсивного торможения двигателя часто используется комбинированный способ, например динамическое торможение в сочетании с торможением коротким замыканием. Этот способ может быть реализован тиристорным устройством (см.рис.4.20) состоящим из двух пар встречно-параллельно включенных тиристоров VS1…VSб, служащих для подключения или отключения двигателя от источника питания, и дополнительного тиристора VS5 для торможения коротким замыканием обмоток статора.
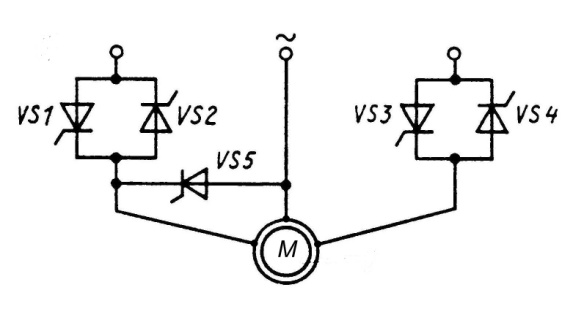
Рис.4.20. Схема тиристорного торможения асинхронного двигателя.
Торможение осуществляется следующим образом. После закрытия тиристоров и отключения двигателя от сети подается сигнал управления на тиристор VS1, который замыкает накоротко две фазы статора. Когда интенсивность торможения коротким замыканием обмоток статора уменьшится, сигнал управления подается на тиристор VS1 который пропускает в цепь статора выпрямленный ток и тем самым обес-
обеспечивает режим динамического торможения. Серийные тиристорные пускорегулирующие устройства обеспечивают и другие варианты торможения АД, а также так называемый безударный его пуск, при котором снижаются броски электромагнитного момента.
|
|
|
