 |


Система отсчета. Реальный мир исследователь Модельный мир. Координаты точки. ИТОГИ ЛЕКЦИИ № 1. Скорость. Вычисление пройденного пути. Ускорение
|
|
|
|
Система отсчета
Это система координат, связанная с телом отсчета и выбранный способ
изм е рения времени (часы).
линейки
часы
Реальный мир исследователь Модельный мир
Рис. 1. 3
В реальном трехмерном мире система отсчета - это набор масштабных
стер ж ней (или линеек) и часы, распол оженные в разных местах этих линеек.
В модельном мире система отсчета превращается в трехмерную систему коо р- динат, положение которой связано с положением тела отсчета. В каждой точке
пространства существует возможность определить время любого происшедш е-
го в этой точке события (рис. 1. 3).
Координаты точки
Первый способ задать положение материальной точки - это задать ее к о-
ординаты. Например, три числа xА, y А , z А (рис. 1. 4) задают положение точки A
в декартовой системе координат.
Рис. 1. 4
Второй спос об задать положение точки – задать радиус -вектор.
Радиус - вектор – это вектор, проведенный из начала координат (рис. 1. 5)
в какую -либо точку пространства.
Если там находится материальная точка, то мы будем им еть радиус -вектор
материальной точки.
Рис. 1. 5
Компоненты радиус -вектора
Из правила сложения векторов следует, что радиус -вектор можно ра з-
|
|
|
ложить на составляющие. На плоскости составляющие вектора - это вект оры
направленные вдоль соответствующих осей координат
(рис. 1. 6). Числа являются проекциями вектора на оси х и
y. Их также называют компонентами вектора.
Рис. 1. 6
В трехмерном пр остранстве:
, (1. 1)
где - единичные векторы, направленные по осям x, y, z соответстве н-
но, или орты.
Рис. 1. 7
По определению, модуль единичного вектора равен единице. Назначение
единичного вектора – указывать направление.
 Числа – компоненты радиус -вектора. Очевидно, они
Числа – компоненты радиус -вектора. Очевидно, они
же являются координатами материальной точки:
. (1. 2)
Модуль радиус -вектора – это его длина. Используя теорему Пифагора, из
рис. 1. 7 получим:
. (1. 3)
Рис. 1. 8 иллюстрирует понятия траектории, пути и пере мещения.
Траектория – это линия, описываемая материальной точкой при ее дв и-
жении.
Путь s – длина пройденного материальной точкой участка траектории.
Перемещение – вектор, проведенный из начального положения мат е-
риальной точки в ее конечное положение:
Рис. 1. 8
ИТОГИ ЛЕКЦИИ № 1
1. Количественный язык физики описывает физические модели, сохр а-
няющие только существенные для рассматриваемой задачи свойства реальной
KKKKKKKKKK. с темы.
2. Основна я задача механики – предсказывать будущее положение тел.
|
|
|
3. Система отсчета – это система координат, связанная с телом отсчета,
и в ы бранный способ измерения времени (см. рис. 1. 4).
4. Положение материальной точки – простейшей физической модели – з а-
дается в выбранной системе отсчета двумя способами:
а) координатным способом, когда задают координаты материальной то ч-
ки, например, декартовы координаты x, y, z (см. рис. 1. 4);
б) радиус -вектором этой точки (см. рис. 1. 5, 1. 7): .
Эти способы задания положения эквивалентны.
5. При движении материальная точка описывает линию, называемую тр а- ект о рией.
Путь – длина отрезка траектории.
Перемещение – вектор , проведенный из начального положения мат е-
ри альной точки в ее конечное положение (см. рис. 1. 8):
ЛЕКЦИЯ № 2
Скорость. Вычисление пройденного пути. Ускорение
§ 1. Скорость
Слово «скорость» мы часто используем в своей речи и на обыде нном
уровне представляем себе, что оно означает величину, характеризующую либо
быстроту движения, либо быстроту какого -либо процесса.
Однако, для того, чтобы ввести в механику точный физический термин
«скорость», потребовалось создать новую область математ ики – научиться оп е-
рировать с бесконечно малыми величинами. Известны многочисленные пар а-
доксы, связанные с проблемой скорости движения. Вот один из них, принадл е-
жащий древнегреческому философу Зенону Элейскому, жившему примерно
2 500 лет тому назад. В этом парадоксе утверждается, что быстроногий Ахил-
лес никогда не сможет догнать медлительную черепаху. Вот как излагает ра с-
|
|
|
суждения Зенона известный американский физик Ричард Фейнман в первом
томе своих лекций по физике. Предположим, что Ахиллес бегает в десять раз
быс т рее черепахи. Пусть в начале состязания черепаха находилась в 100 метрах
вп е реди Ахиллеса. Тогда ко времени, когда Ахиллес пробежит эти 100 метров,
черепаха окажется в 10 метрах впереди него. Пробежав и эти 10 метров, Ахи л-
лес увидит черепаху в 1 м етре впереди себя. За то время, пока он пробежит этот
метр, черепаха пройдет 10 сантиметров и так далее… до бесконечности. След о-
вательно, в любой момент времени черепаха будет впереди Ахиллеса, и он н и-
когда не сможет перегнать ее! В чем ошибочность этих ра ссуждений? Коне ч-
ный интервал времени можно разделить на бесконечное число частей. Но бе с-
конечное число этапов до того места, где Ахиллес поравняется с черепахой,
вовсе не о значает бесконечное количество времени. Для того, чтобы научиться
правильно опериро вать с бесконечно малыми величинами, человечеству пон а-
добилось примерно 2 000 лет. Честь создания дифференциального и интеграл ь-
ного и счисления принадлежит И. Ньютону (наряду с Г. Лейбницем). В своем
гранд иозном труде «Математические начала натуральной фило софии» (1687 г. )
Ньютон сформулировал исходные понятия и основные законы классической
мех а ники.
Сейчас мы дадим точное и строгое определение физического термина
«скорость». Исходя из этого определения, выясним свойства скорости.
Скорость – это производная радиус -вектора по времени.
|
|
|
либо, применяя другое
обозначение производной . (2. 1)
по времени,
 Как видно из этого определения, скорость – величина векторная, т. е. когда
Как видно из этого определения, скорость – величина векторная, т. е. когда
употребляют термин «скорость», имеют в виду вектор, который имеет две х а-
рак теристики: направление и модуль.
Скорость направлена по касательной к траектории. Это можно устан о-
вить, проанализировав определение скорости (2. 1).
Так как
, (2. 1а)
LLLLLLLLLL. направление вектора совпадает с предельным направлением вектора. На рис. 2. 1а, 2. 1б, 2. 1в показаны этапы предельного перехода для плоского
движения, когда материальная точка движется по произвольной траект ории.
На рис. 2. 1а изображ ены радиус -векторы материальной точки для моме н-
тов времени t1 и t2, а также вектор перемещения этой материальной
точки за промежуток времени Отношение перемещения к
промежутку времени t дает среднюю скорость < v> материальной точки за
пром ежуток времени t:
(2. 1б)
Направление средней скорости, как следует из ее определения (2. 1б), со в-
падает с направлением вектора переме щения.
При уменьшении промежутка времени t радиус -вектор приближается к
. При этом вектор перемещения меняет свое направление, он поворач и-
вается против часовой стрелки. Модуль вектора уменьшается. Это пром е-
жуточное положение при совершении предельного перехода ( t 0) зафикс и-
ровано на рис. 2. 1б.
При дальнейшем уменьшении t и приближении к направление ве к-
тора приближается к направлению касательной к траектории. Как известно
из геометрии, касательная есть предельное положение секущей.
Значит, когда предельный переход будет завершен, бесконечно малый вектор
перемещен ия будет направлен по касательной к траектории.
Следовательно, и вектор скорости будет направлен по касательной к
траектории. Это изображено на рис. 2. 1в.
 Рис. 2. 1а
Рис. 2. 1а
r
r
x
Рис. 2. 1б
Рис. 2. 1в
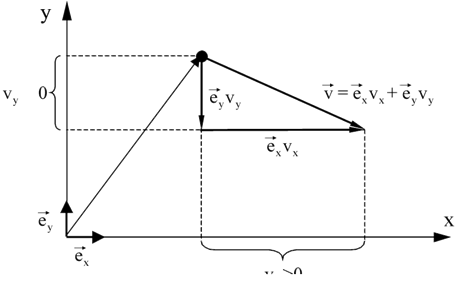
 Компоненты скорости
Компоненты скорости
На рис. 2. 2 изображен вектор скорости материальной точки, движуще й-
|
|
|
ся по плоскости x, y. Вектор можно разложить на два составляющих его ве к-
тора .
Vу 0
Рис. 2. 2
Компоненты скорости, т. е. проекции вектора на координатные оси об о-
значены vx, vy. Так как на рис. 2. 2 вектор направлен по оси х, то комп о-
нента скорости v у нас направлен против оси, значит, соо т-
x > 0. Вектор
ветствующая комп онента скорости vy < 0.
Из определения (2. 1) и формулы (1. 1) следует, что для трехмерного пр о-
странства скорость в декартовых координатах выражается следующим обр а-
зом:
(2. 1а)
С другой стороны:
, (2. 1б)
откуда
(2. 2)
т. е. компоненты скорости в декартовых координатах равны производным с о-
ответствующих коор динат по времени.
Модуль скорости – это производная пути по времени . В самом деле, при
(см. рис. 1. 8, 2. 1а, 2. 1б). Используя это, получим для модуля
скорости из определения (2. 1а):
. (2. 3)
Выра зим модуль скорости через ее компоненты. По теореме Пифагора (см.
рис. 2. 2):
.
В трехмерном пространстве и модуль скорости: (2. 4)
. 2. Вычисление пройденного пути
Для равномерного движения , т. е. для движения с постоянной по модулю
скоростью: , путь равен:
, (2. 5)
где s12 – весь путь (рис. 2. 3);
t – весь отрезок времени;
– const.
Рис. 2. 3
Формула (2. 5), известная по школьному курсу физики, следует из формулы
(2. 3). Запишем формулу (2. 3) в следующем виде:
,
тогда
, (2. 3а)
здесь ds – бесконечно малый отрезок пути, пройденный за бесконечно малое
время dt.
Складывая все ds, получим , сумма всех dt даст время движения t. Оп е-
рация сложения бесконечно м алых величин носит в математике название и н-
тегрир ования. Интегрируя (2. 3а), получим:
.
В правой части мы вынесли за знак интеграла скорость v, так как она в на-
шем случае постоянна. Интеграл от ds есть s12, а интеграл от dt – время д виж е-
ния t, следовательно, мы получим формулу, совпадающую с (2. 5):
Для произвольного движения (рис. 2. 4), т. е. для движения с переменной
скоростью разобьем весь путь на очень маленькие участки s:
.
Рис. 2. 4
Значения модуля скорости в течение отрезка времени приблиз и-
тельно постоянны, если достаточно малы.
В пределе:
, (2. 6)
т. е. п уть – это определенный интеграл от модуля скорости по времени.
Так как модуль скорости – величина положительная, то путь всегда пол о-
жителен и может только возрастать с течением времени.
§ 3. Ускорение
В общем случае скорость материальной точки может изме няться как по
величине (т. е. по модулю), так и по н аправлению. Быстроту этого изменения
характеризует векторная величина, которую называют термином «ускор ение».
Ускорение – это производная скорости по времени.
или . (2. 7)
Учитывая, что (2. 1), получим:
. (2. 8)
Ускорение – вторая производная радиус -вектора по времени. Произво д-
ную по времени от какой -либ о величины называют скоростью изменения этой
вел и чины. Ускорение – это скорость изменения скорости.
Вектор ускорения , так же, как и векторы, можно разложить на
составляющие:
,
где а х, аy, а z – компоненты ускорения.
Из определения (2. 7) и формулы (2. 1б) следует, что:
, (2. 9)
т. е. компоненты ускорения равны производным по времени от соответству ю-
щих компонент скорости.
Используя формулы (2. 8) и (1. 1 ), получим, что:
, (2. 9а)
т. е. компоненты ускорения равны вторым производным по времени от соо т-
ветствующих координат материальной точки.
§ 4. Нахождение зависимости скорости от времени
Запишем первую из формул ( 2. 7) в следующем виде:
. (2. 7а)
Формула (2. 7а) позволяет найти приращение скорости за бесконечно
малый промежуток времени dt. Если известна начальная скорость
, то, используя (2. 7а), можно найти скорость спустя бесконечно
малый интервал dt:
(2. 10)
Если нам известна зависимость ускорения от времени, т. е. функция
LLLLLLLLLL. н ачатый формулой (2. 10) процесс вычисления зависимости - скорости
от времени – можно бесконечно продолжать. В математике эта операция наз ы-
вается интегрированием. Возьмем определенный интеграл в пределах от нуля
до t от обеих частей р авенства (2. 7а):
(2. 11)
Как известно из математики, интеграл от дифференциала равен разн о-
сти значений функции на верхнем и нижнем предела х. Тогда из (2. 11) пол у-
чим:
откуда для имеем:
(2. 12)
Для нахождения зависимости по формуле (2. 12) необходимо в ка ждом
конк ретном случае взять интеграл от ускорения по времени.
|
|
|
