 |


Воздушная система. Общие сведения.
|
|
|
|
Воздушная система состоит из трех самостоятельных систем: основной, аварийной и системы поддавливания блоков радиооборудования.
Основная воздушная система осуществляет:
-управление торможением колес шасси (выполняет командные функции, исполнительные функции выполняет рабочая жидкость общей гидросистемы);
-включение противообледенительной системы фонаря, герметизацию фонаря;
-управление кранами аварийного слива топлива, управление перекрывными кранами топлива;
-управление заслонками охлаждения генераторов;
-управление автоматическим и ручным выпуском парашюта и ручным сбросом парашюта;
-управление открытием створок турбостартера.
Аварийная воздушная система осуществляет аварийный выпуск шасси, щитков шасси.
Система поддавливания блоков радиооборудования обеспечивает наддув блоков. Источником энергии для всех систем является сжатый воздух, который расходуется из воздушных баллонов, находящихся на самолете.
Для увеличения общего запаса воздуха и обеспечения надежной работы особо важных агрегатов в воздушной системе, кроме основных баллонов, в системе тормозного парашюта и в системах поддавливания блоков установлены дополнительные баллоны. Эти баллоны отделены от всей системы обратными клапанами и могут разряжаться только на агрегаты указанных систем.
Управление воздушной системой и контроль за ее работой производятся из кабины летчиком. Подача воздуха в исполнительные агрегаты осуществляется клапанами и кранами как с ручным, так и с дистанционным управлением. Краны и клапаны, управляемые вручную, стоят в кабине, к ним подсоединены трубопроводы для подвода воздуха. От электроклапанов в кабину к элементам управления проведена электропроводка.
|
|
|
Пневматический привод
Пневматическим приводом называют систему агрегатов и машин, служащие для передачи механической энергии с помощью сжатого газа.
Использование сжатого газа для этих целей очень удобно для ЛА, у которых время полета невелико. Сжатый газ находится под большим давлением и при включении системы управления перед поступлением в пневмопривод пропускается через редуктор, который понижает его давление до 1,01325 МПа. По сравнению с другими видами привода пневмопривод отличается простотой и дешевизной конструкции, а также простотой аккумулирования энергии. При кратковременной работе небольшой объем баллона сжатого воздуха обеспечивает достаточную мощность на выходе.
Область применения пневмопривода ограничивает сжимаемость воздуха. Это явление вызывает автоколебания в контуре привода и не позволяет обеспечить требуемую плавность хода органа управления. Поэтому пневмопривод не применяется при больших нагрузках.
Увеличение влаги в воздухе при высоких температурах вызывает коррозию (не держится смазка), а при низких — обледенение дроссельных отверстий, приводящих к изменению параметров или потере работоспособности.
Улучшение динамических свойств пневматической машины возможно при использовании отработанного горячего газа высокого давления, например отработанных газов реактивного двигателя или газа специального газогенератора.
Особые трудности построения таких машин состоят в том, что горячий газ имеет температуру 800—2000°С. Кроме того, газ не обладает смазывающими свойствами и имеет в своем составе продукты неполного сгорания топлива, которые могут засорять газопроводы и дроссели.
Агрегаты гидросистем:
Гидронасосы: (ТНУ, НС, шестерёнчатые, плунжерные…)
Гидробаки: (Основной, Дренажный)
|
|
|
Гидроцилиндры
Гидроаккумуляторы
Краны (замков, створок, шасси)
Клапаны: (бортовой, предохранительный, подпорный, перепускной, обратный)
Редуктор
Агрегат управления
Дроссель, Демпфер, Переключатель, Фильтр, Отстойник, Сепаратор.
Автопилот
Автопилотом называется автоматическое устройство, предназначенное для стабилизации заданного режима полета самолета: например курса, высоты полёта, крена, тангажа и изменяет режим полёта в соответствии с предписанной программой или по командам, задаваемым извне.
Автопилот вместе с самолётом составляет единую замкнутую систему автоматического регулирования, где автопилот является регулятором, а самолёт объектом регулирования. В отношении выбора схемы и параметров стабилизация и управление самолётом с помощью автопилота представляет собой задачу автоматического регулирования.
Выбор схемы автопилота, конструкции его элементов определяется назначением автопилота. В авиации автопилот облегчает работу лётчика, заменяя его во всех режимах полета самолета.
Задача автоматического пилотирования состоит в поддерживании заданного режима полета самолета.
Первоначально при автоматизации полета роль автопилота заключалась в частичной разгрузке пилота от пилотирования самолетом. Затем с помощью автопилота навигационных и других средств стала возможной полная автоматизация различных этапов полета, начиная от взлета и кончая посадкой. В этом случае пилотирование самолетом осуществляется только с помощью автопилота, который является составной частью общей автоматической бортовой системы управления.
Как бы не использовался автопилот, всюду он выполняет функции автоматического регулятора. Поэтому совокупность кинематических параметров движения самолета с автопилотом следует рассматривать как систему автоматического регулирования.
Самолет как объект управления по отношению к угловым движениям является системой с тремя степенями свободы. Поэтому для управления самолетом автопилот должен иметь не менее трех каналов управления в соответствии с тремя органами управления рулем направления, рулем высоты и элеронами. Поэтому и каналы автопилота получили наименование: канал руля направления, канал руля высоты и канал элеронов. Указанные каналы могут быть связаны между собой и могут быть независимыми.
|
|
|
Обычно каналы автопилота построены не только по одинаковым функциональным схемам, но и содержат одинаковые отдельные устройства.
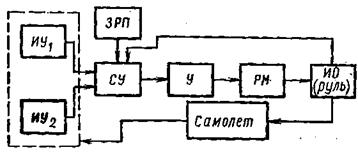
В общем случае функциональная схема одного из каналов управления автопилота вместе с самолетом представлена на рисунке.
|
В нее входят: измерительные устройства (чувствительные элементы) (ИУ), суммирующие устройство (СУ), усилитель (У), рулевая машина (силовой привод) (РМ), исполнительный орган (ИО).
Функциональная схема одного из каналов автопилота (ИО), задатчик режима полета (ЗРП). Следует заметить, что в некоторых автопилотах не удается выделить его элементы в те звенья, которые изображены на рисунке. Суммирующее и усилительное устройство могут представлять один элемент или могут быть дополнительные промежуточные элементы в схеме автопилота.
Измерительные устройства являются чувствительными элементами канала автопилота, воспринимающими отклонения самолета от заданного положения.
В качестве измерительных устройств в автопилотах широко используются гироскопические приборы, реагирующие на угловые отклонения самолета и их производные. Например, трехстепенной гироскоп определяет угловое отклонение самолета, двухстепенный — угловую скорость.
Помимо приборов, непосредственно измеряющих углы и их производные, в автопилотах широко используются различного типа дифференцирующие и интегрирующие устройства.
Для измерения линейных отклонений, например, высоты, применяется барометрическое устройство, аналогичное высотомеру.
Гироскопические измерительные устройства обладают тем преимуществом, что они являются безынерционными звеньями, т. е. измерение регулируемого параметра производится без запаздывания.
Суммирующее устройство служит для алгебраического сложения сигналов, поступающих от измерительных устройств, устройств обратной связи и задатчика режима полета.
В качестве суммирующего устройства в современных автопилотах широко используются потенциометрические и мостовые схемы, а также магнитные усилители, которые, помимо суммирования входных сигналов, усиливают их.
|
|
|
Усилитель служит для усиления сигналов до величины, способной управлять рулевой машиной. В современных автопилотах усилитель электронный представляет собой комбинацию магнитного усилителя с электронным и имеет несколько каскадов, обеспечивающих усиление суммарного сигнала как по величине, так и по мощности.
Рулевая машина является исполнительным органом автопилота и служит для привода руля самолета в соответствие с заданным законом управления.
В современных автопилотах применяются как электромеханические, так и электрогидравлические рулевые машины.
Устройство обратной связи и за датчик режима полета в большинстве автопилотов выполнены в виде потенциометрических датчиков, преобразующих в первом случае угол отклонения руля в электрическое напряжение, а во втором случае—угол поворота рукоятки управления также в электрическое напряжение.
Указанные звенья автопилота при рассмотрении законов управления будем полагать безынерционными.
|
|
|
