 |


Представление состояний систем в виде графов
|
|
|
|
Теория графов получила распространение в связи с необходимостью анализа последовательности переходов вычислительных алгоритмах. В теории графов используется язык графического обозначения направления переходов из одного состояния в другое. Использование теории графов для описания моделей систем управления со сложной структурой, стало распространенным в последнее время. Графовая форма описания модели позволяет эффективно использовать новые возможности языков программирования, такие как указатели, списки, классы, множественное наследие. Представление в форме ориентированного (сигнального) графа, в частности структурной схемы, расширяет информацию о модели, позволяя вводить причинно-следственные отношения. Знание о направленности связей имеет большое значение для задач анализа и синтеза. В качестве иллюстрации на рис. 1.1-1.4 приведены примеры ориентированных моделей графов, последний из которых представляет диаграмму модели странного аттрактора Лоренца [9]. Эта форма представления позволяет эффективнее решать задачи выделения путей и контуров, связности, структурной управляемости и многие другие.
Модель системы представляется ориентированным графом H=<G,H> с множеством переменных Х=x1,...., xn , где n - общее множество вершин с множеством дуг G и упорядоченных пар номеров смежных вершин G=(i,j)1,... (i,j)n. Общее количество таких пар обозначено в примерах как Q.
Несмотря на всю компактность и удобство такой записи на практике чаще используют матрицу смежности R=rij, показывающую наличие дуги между i -ой и j -ой вершинами.
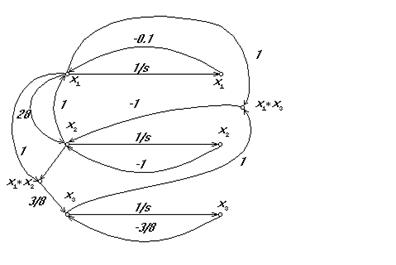
Рис. 1.4. Модель странного аттрактора в форме ориентированного графа

Рис. 1.5. Модель алгоритма переходных состояний системы в форме ориентированного графа
|
|
|

Рис. 1.6. Модель системы в форме гиперграфа

Рис. 1.7. Модель странного аттрактора в форме гиперграфа
Описание сложных процессов и систем графами переходов из различных состояний Рi показано на рис. 1.8. При этом различают несвязанные, слабосвязанные и сильно связанные системы.

Рис. 1.8. Схемы соединения при решении задач в теории графов
Другим способом представления топологии связей в системе является матрица смежности (наличия связей) R и изоморфности D, в строках которой представлены номера входящих (с плюсом) и выходящих (с минусом) дуг.
Для приведенного примера матрицы смежности и изоморфности имеют вид:

Избыточность хранимой информации в матрице смежности (нулевые значения) компенсируются простотой вычислительных алгоритмов и скоростью получения требуемой информации из матрицы. Кроме того, наличие только двух значений 0 или 1, дает возможность использовать для ее представления битовые поля, что значительно экономит память и, при размерах системы порядка 100 элементов. Если использование матрицы R в обычной десятичной форме не уступает по затратам ресурсов на хранение, то значительно упрощает алгоритм обработки информации. Использование матриц смежности и изоморфности имеет большое значение для топологического анализа алгоритмов [10].
Ориентированные графы и структурные схемы обычно широко используются при описании линейных систем и систем с входовыми нелинейностями. Однако возникают некоторые затруднения при описании нелинейных систем, где нелинейные функции могут зависеть от нескольких переменных, например при описании операций умножения и деления.
Гиперграфы
Гиперграфы являются теоретико-множественной формой представления дифференциальных уравнений, заданных в общем случае не причинно—следственным способом [13]. По сравнению с графом, представление модели в форме гиперграфа расширяет возможности представления многовходовых элементов, однако при этом теряется информация о направленности связей.
|
|
|
Гиперграф определяется как пара H=<X,E> образующая конечное множество X=x1,...,xn вершин и некоторое семейством E=e1,...,eq ребер - непустых частей Х, удовлетворяющих условию UE=X [17]. Одним из способов задания топологии гиперграфа [22], является матрица  , где
, где

Гиперграф является вариантом симплециального комплекса или симплециальной схемы [23]. В ряде работ [25-27], вводится понятие ориентированного гиперграфа. При этом множество E - определяется как множество ориентированных ребер.
Примеры гиперграфов приведены на рис. 1.6 и рис. 1.7. Из диаграмм видно, что гиперграф является способом группирования зависимых переменных, без указания причинно-следственных отношений между ними.
При представлении алгоритма или модели в виде гиперграфа, также возникают проблемы при представлении в виде системы уравнений и, наоборот, легко можно предлагать автоматическое построение гиперграфа по введенной системе уравнений.
|
|
|
