 |


И подставим их в (3.21). После несложных преобразований получим
|
|
|
|
хо = _fx-yi + f* =(х-у% + fa) х [l - fia + ^соТ"1
xa + ya-f Ук I {f f)
Известно, что (1 -е)"1 = 1 + б + е2 +..., если е - малое число. Поэтому, удерживая члены первого порядка малости, будем иметь
 |
| ("2 V |
хг = xi +
/ + f]ai+-a*4-WCi.
Получим такое же выражение для соответственной точки правого снимка, учтем в нем поправку за колебание высоты фотографирования, равную Х2&Н/Н, и заменим в поправочных членах х\ на х2 + р и уг на у2
*i° = *i +1 / + ^f «l + ^Ч - y2xi + x*pf+ p ax + ^©i, *° = *i + (/ + ^f-Vi + ^рЧ - У2Х2 + ^^
Переходя к параллаксам р°=д:01-х02, р = Х\ -х% и принимая во внимание, что аг-ai = Да, a>2-<Bi = Aco и X2_Xi = Д%> найдем:
po=p-fAa-ЈAa-x2{№ - 2^р-Х^^+у2Аг+^щ+^-а1.
Представим продольный параллакс произвольной точки в виде параллакса начальной точки и измеренной разности продольных параллаксов, т.е. р = р1 + Ар:
| -Асо + |
р° = p-fAa --------- LAa
х,
| х2у |
f—--2(p]+Ap)a, ti
Р\ Ар. р: + 2р.Ар + Ар-
а,
(И.1)
Найдем трансформированный параллакс начальной точки, подставив в (11.1) ее координаты Х2 = г/2 = 0 и Ар = О
р? = рг - /Аа + ^ах
(П.2)
и вычтем это значение из (11.1). Отбрасывая по малости член 4Р2а/Д и перегруппировав поправочные члены, получим следующую формулу трансформирования измеренной разности продольных параллаксов:
Ар0 =Ар- ^Аа - 4{f^ - 2Лах) - ^Асо +
| РО |
АН
+й(ах + f а* 1 + 2^ + Шщ + 2^ах
(П.З)
Хн
У2
Расчет
Выражение (11.3) называется уравнением ориентирования снимков на стереометре. Именно это уравнение решают при рисовке рельефа коррекционные механизмы прибора, представляющие собой систему линеек, устанавливаемых по элементам взаимного и внешнего
ориентирования снимков и обеспечивающие введение соответствующих поправок в измеряемую разность продольных параллаксов. Наименования этих коррекционных механизмов указаны под соответствующими членами уравнения ориентирования (11.3), последний член которого учитывается в необходимых случаях, расчетным путем.
|
|
|
Устройство стереометра СТД-2
Топографический стереометр (рис. 11.2) - представляет собой настольный прибор размерами 550x350x250 мм, состоящий из наклонной станины, основной каретки, зеркального микроскопа с увеличением около 2,5х и шести коррекционных механизмов. Перемещение основной каретки с левым и правым снимкодержателями 8 выполняется кремальерным винтом 3; величину перемещения можно отсчитать по линейке 14. Зеркальный микроскоп 7 с помощью винтов 10 перемещается вдоль оси У прибора.
Над аэроснимками на поворотных держателях 13 натянуты нити 9 толщиной 0,04 - 0,05 мм, с помощью которых выполняется визирование наточки модели.
| Рис. 11.2. Топографический стереометр СТД-2 |
Аэроснимки укладываются в снимкодержатели 8, центрируются и ориентируются по начальным направлениям поворотными винтами 6. Измеряемые винтом 4 разности продольных параллаксов автоматически трансформируются на горизонтальную плоскость с помощью шести коррекционных механизмов (табл. 11.1).
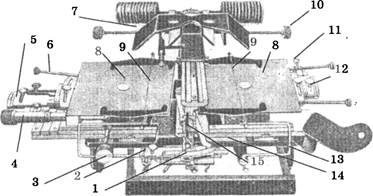
Таблица 11.1

| название |
| Ml Ро Хн Yi Y2 |
Корректор
номер на рис. 11.2
(1) (15)
(12) (11)
(2) (5)
Назначение коррекционного механизма
учет влияния взаимного продольного угла наклона Да учет влияния продольного угла наклона левого снимка си и разности высот фотографирования ЛЯ;
учет влияния взаимного поперечного угла наклона Лео; учет влияния взаимного разворота снимков Дх и поперечного угла наклона левого снимка о^;
[учет влияния продольного угла наклона левого снимка си и измеряемой разности продольных параллаксов Лр;
учет влияния поперечного угла наклона левого снимка coi и измеряе-
мой разности продольных параллаксов Др. ________________
Установки коррекционных механизмов выполняются в соответствии с их рабочими формулами и уравнением (11.3).
|
|
|
|
|
|
