 |


Преобразование координат точек фотограмметрической модели в систему координат местности
|
|
|
|
Рис. 10.1. Варианты технологии построения фотограмметрической модели
Построение фотограмметрической модели в произвольно выбранной системе координат представляется чуть более сложным, но в ряде случаев это вполне оправдано конкретными условиями обработки данных.
Построение фотограмметрической модели по трем аэроснимкам
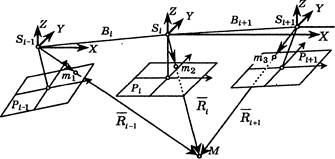
Три смежных снимка, принадлежащие двум смежным стереопарам и имеющие зону тройного продольного перекрытия, образуют фотограмметрический триплет. Средний снимок S\ {рис. Ю.2) и точки тройного продольного перекрытия входят как в предыдущую стереопару (*-1, i), так и в последующую (i, i+1).
Фотограмметрический триплет строится в координатной системе StXYZ, начало которой совмещено с центром фотографирования
|
| *-х |
Рис. 10.2. Фотограмметрический триплет
среднего снимка St (рис. 10.2), а оси X и Y параллельны осям координат его внутренней координатной системы оху. Взаимное ориентирование снимков триплета выполняется в линейно-угловой системе; дополнительно к условиям компланарности соответствующих векторов в обеих стереопарах используется масштабное условие, требующее равенства длин проектирующих лучей для связующих точек, располо-женныхъ зоне тройного продольного перекрытия.
Названные условия выражаются тремя зависимостями, из которых две описывают условия компланарности для левой и правой стереопар, а третья - масштабное условие.
Оба условия компланарности должны быть записаны для координатной системы, параллельной осям среднего снимка, но формы их записи для левой и правой стереопар будут различны. Так, в правой стереопаре PtPt+i координатная система аналогична принятой при выводе условия (9.18), а для левой стереопары Pt-\Pt условие компланарности в системе координат StXYZ записывается в виде:
|
|
|
| вх | BY | вг |
| х\ | у; | z[ |
| \Х2 | у- | -f |
= 0
(10.1)
Условие совпадения длин проектирующих лучей Si-\M, SjM, и Si+iM (рис. 10.2) запишем, воспользовавшись равенствами (9.3):
| N, |
'т/х,2 + Y; + Z] -N2,JX$ + Y; + Z2 = 0,
(10.2)
где N2 и Ni - скалярные множители, определяемые по формулам (9.2) в левой и правой стереопарах; Хх, Yj, Z\ - координаты связующей точки, вычисленные в левой стереопаре относительно среднего
центра St\ X2, У2» Z2 - координаты тех же точек в правой стереопаре относительно того же центра S*.
С учетом изложенного уравнение поправок, возникающее при построении фотограмметрического триплета, имеет вид:
с?.5т. + <i,5v. + d,Act. + d,8Aco. + d.&Ay, + ]
. 1 2 1 3 1 4 1 5 *1 I (ЮЗ)
+ <268т2 + d78v2 + d8Act2 + d98Aw2 + d108x2 + dN8b2 + / = vj
где d\, d<i>... rfn - частные производные от функций (9.18), (10.1) и (10.2) по соответствующим неизвестным, а нижние индексы при элементах взаимного ориентирования обозначают номер стереопары: левая (1) или правая (2).
Решение уравнений (10.3) методом наименьших квадратов позволяет отыскать как элементы ориентирования крайних снимков относительно среднего, так и поправку к базису фотографирования второй стереопары, что обеспечивает построение сдвоенной модели (триплета) в единой системе координат и в одном масштабе.
Обратим внимание на следующее.
Включение в фотограмметрическую сеть одной точки стереопары сопровождается выполнением минимум четырех измерений (координаты, продольный и поперечный параллаксы), из которых три необходимы для определения пространственных координат точки, а одно оставшееся измерение используется для определения элементов взаимного ориентирования.
Для связующей точки, расположенной в зоне тройного продольного перекрытия, измеряются восемь величин (координаты и параллаксы в стереопарах 1-2 и 2-3), причем, ее координаты на среднем снимке измеряются дважды. Если в процессе предварительной обработки координаты этой точки на среднем снимке 2 усреднены, то останется шесть измерений, из которых три необходимы для определения пространственных координат, два - для взаимного ориентирования стереопар, и остаётся лишь одно измерение, которое можно использовать для связи смежных моделей на основе условия равенства длин проектирующих лучей (10.2) или скалярных множителей N\ и N2-
|
|
|
Если же координаты связующей точки не усреднялись, то из восьми измерений три по-прежнему используются для нахождения пространственных координат точки, два - для взаимного ориентирования, а три оставшихся можно использовать для объединения моделей на основе условия равенства трех координат связующих точек.
|
|
|
