 |


Расчетные формулы для определения параметров
|
|
|
|
Расчетные формулы для определения параметров
поступательного движения тела
Все точки тела движутся одинаково.
Закон равномерного движения: S = So + vt.
Закон равнопеременного движения:
 Здесь So— путь, пройденный до начала отсчета, м;
Здесь So— путь, пройденный до начала отсчета, м;
v o —начальная скорость движения, м/с;
at — постоянное касательное ускорение, м/с2
Скорость: v = S´; v = vo + att.
Ускорение: at = v´.
Закон неравномерного движения: S = f(t3).
Кинематические графики поступательного движения представлены на рис. П4. 1.

Практическое занятие 4 153
Расчетные формулы для определения параметров
вращательного движения
Точки тела движутся по окружностям вокруг неподвижной оси (оси вращения).
Закон равномерного вращательного движения: φ = φ o+ ω t.
Закон равнопеременного вращательного движения:

Законнеравномерного вращательного движения: φ = f(t3).
Здесь φ — угол поворота тела за время t, рад;
ω — угловая скорость, рад/с;
φ o— угол поворота, на который развернулось тело до начала отсчета;
ω о — начальная угловая скорость;
ε — угловое ускорение, рад/с2;
Угловая скорость: ω = φ '; ω = ω o + ε t;
Угловое ускорение: ε = ω '.
Кинематические графики вращательного движения представлены на рис. П4. 2.

Число оборотов вращения тела: z = φ /(2π ).
Угловая частота вращения: n, об/мин.

154 Практическое занятие 4

Рекомендации для решения задач
|
|
|
расчетно-графической работы
Задание 1
1. Определить вид движения на каждом участке по приведенному кинематическому графику.
2. Записать законы движения шкива на каждом участке. Параметры движения в конце каждого участка являются начальными параметрами движения на каждом последующем.
3. Определить полный угол поворота шкива за время вращения. Использовать формулу для перехода от угловой частоты вращения к угловому ускорению.
4. Определить полное число оборотов шкива, используя формулу

5. Построить графики угловых перемещений и угловых
ускорений.
6. Определить нормальное и касательное ускорения точки на
ободе шкива в указанные моменты времени.
Задание 2
1. Подставив заданные коэффициенты в общее уравнение движения, определить вид движения.
2. Определить уравнение скорости и ускорения груза.
Расчетно-графическая работа
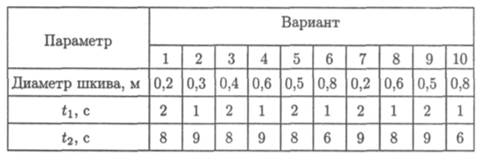
Задание 1. Частота вращения шкива диаметром d меняется согласно графику. Определить полное число оборотов шкива за время движения и среднюю угловую скорость за это же время. Построить
Практическое занятие 4 155
график угловых перемещений и угловых ускорений шкива. Определить ускорения точек обода колеса в моменты времени t1 и t2.

Задание 2. Движение груза А задано уравнением
у = at2 + bt + с, где [у] = м, [t] = с. Определить скорость и ускорение груза в моменты времени t1 и t2, а также скорость и ускорение точки В на ободе барабана лебедки (рис. П4. 4).
156 Практическое занятие 4

При защите работы ответить на вопросы тестового задания.
Тема 1. 9. Кинематика.
Простейшие движения твердого тела

Практическое занятие 4 157
|
|
|

158 Практическое занятие 5
Практическое занятие 5
Темы 1. 14, 1. 15. Работа и мощность.
Общие теоремы динамики
Знать зависимости для определения мощности при поступательном и вращательном движениях. КПД.
Знать основные уравнения динамики при поступательном и вращательном движениях твердого тела.
Уметь рассчитывать мощность с учетом потерь на трение и сил инерции.
Уметь определять параметры движения с помощью теорем динамики.
|
|
|
