 |


Нормальное (центростремительное) ускорение
|
|
|
|
 , или
, или  ,
,
то есть равно квадрату угловой скорости, умноженному на расстояние от точки до оси вращения, направлено к центру окружности, описанной точкой.
Модуль полного ускорения
 , или
, или  .
.
Направление 
 определяется углом
определяется углом  :
:  .
.
Частные случаи вращательного движения
1. Равномерное вращение ( )
)
 , откуда
, откуда  . После интегрирования получим уравнение равномерного вращения:
. После интегрирования получим уравнение равномерного вращения:  .
.
Так как  , то касательное ускорение равно нулю
, то касательное ускорение равно нулю  . Поэтому полное ускорение равно нормальному
. Поэтому полное ускорение равно нормальному  .
.
2. Равнопеременное вращение ( ).
).
За равные промежутки времени угловая скорость изменяется на одну и ту же величину.
 , откуда
, откуда  . После интегрирования находим закон изменения угловой скорости
. После интегрирования находим закон изменения угловой скорости  .
.
Определим закон вращения.  .
.
После интегрирования получим уравнение равнопеременного вращения  .
.
Отметим, что полученные уравнения аналогичны уравнениям, найденным ранее для движения точки.

|
| R |

|

|

|
| α |
| Рис. 12.6 |

|

|
Векторные формулы для скоростей и ускорений
Легко убедиться, что вектор скорости любой точки равен векторному произведению:  ,
,
где  - радиус-вектор точки с началом в любой точке, лежащей на оси вращения тела (рис. 12.6).
- радиус-вектор точки с началом в любой точке, лежащей на оси вращения тела (рис. 12.6).
Это выражение называется векторной формулой Эйлера.
Направление скорости соответствует правилу определения направления векторного произведения.
Модуль скорости  .
.
Справедливо также

Ускорение точки

Или  .
.
Касательное ускорение точки твердого тела, вращающегося вокруг неподвижной оси, равно векторному произведению вектора углового ускорения на радиус-вектор этой точки относительно любой точки, лежащей на оси вращения
 .
.
Нормальное (центростремительное) ускорение точки тела, вращающегося вокруг неподвижной оси, равно векторному произведению вектора угловой скорости на вращательную скорость этой точки
|
|
|
 .
.
Билет№10
До сих пор речь шла о движении точки относительно неподвижной системы отсчета, за которую принята система, неподвижно связанная с Землей.
Движение точки по отношению к этой системе называется абсолютным.
Во многих задачах необходимо рассматривать движение точки как сложное (составное). В простейших случаях оно состоит из переносного и относительного движений.
Относительным движением называется движение точки по отношению к подвижной системе отсчета.
Переносным движением называется движение подвижной системы отсчета и всех связанных с ней точек относительно системы отсчета, принятой за неподвижную.
Удобно представить переносное движение точки, ее скорость и ускорение, если мысленно остановить относительное движение точки и определить ее скорость и ускорение относительно неподвижной системы отсчета как точки, неизменно связанной с подвижной системой отсчета.
Подобным образом можно, мысленно остановив переносное движение, представить относительное движение точки, ее скорость и ускорение по отношению к подвижной системе отсчета.
Условимся все характеристики обозначать индексами:  - для абсолютного,
- для абсолютного,  - для переносного,
- для переносного,  - для относительного движений.
- для относительного движений.
Абсолютной скоростью  и абсолютным ускорением
и абсолютным ускорением  точки называются ее скорость и ускорение относительно системы отсчета, принятой за неподвижную.
точки называются ее скорость и ускорение относительно системы отсчета, принятой за неподвижную.
Относительной скоростью  и относительным ускорением
и относительным ускорением  точки называются скорость и ускорение точки по отношению к подвижной системе отсчета.
точки называются скорость и ускорение точки по отношению к подвижной системе отсчета.
Переносной скоростью  и переносным ускорением
и переносным ускорением  какой-либо точки
какой-либо точки  называются абсолютная скорость и абсолютное ускорение той точки
называются абсолютная скорость и абсолютное ускорение той точки  , неизменно связанной с подвижной системой отсчета, с которой совпадает в рассматриваемый момент данная точка М.
, неизменно связанной с подвижной системой отсчета, с которой совпадает в рассматриваемый момент данная точка М.
|
|
|
Теорема о сложении скоростей. Абсолютная скорость точки равна геометрической сумме ее переносной и относительной скоростей:

| Рис. 13.1 |

|
 .
.
Доказательство
Пусть точка  движется относительно подвижной системы отсчета и вместе с ней движется относительно неподвижной системы отсчета (рис. 13.1).
движется относительно подвижной системы отсчета и вместе с ней движется относительно неподвижной системы отсчета (рис. 13.1).
Положение точки  в подвижной системе отсчета
в подвижной системе отсчета  характеризуется радиусом-вектором
характеризуется радиусом-вектором
 , (13.1)
, (13.1)
где  - единичные векторы (орты) в подвижной системе отсчета.
- единичные векторы (орты) в подвижной системе отсчета.
Относительная скорость  может быть получена дифференцированием радиуса-вектора
может быть получена дифференцированием радиуса-вектора  по времени в предположении, что переносного движения нет, то есть орты
по времени в предположении, что переносного движения нет, то есть орты  являются постоянными векторами:
являются постоянными векторами:
 . (13.2)
. (13.2)
Положение начала координат  определяется радиусом-вектором
определяется радиусом-вектором  , а положение точки
, а положение точки  по отношению к неподвижной системе отсчета вектором
по отношению к неподвижной системе отсчета вектором  .
.
Можно написать
 . (13.3)
. (13.3)
Вектор переносной скорости точки  определяется дифференцированием вектора
определяется дифференцированием вектора  по времени в предположении, что относительного движения нет, то есть
по времени в предположении, что относительного движения нет, то есть  постоянные, а
постоянные, а  изменяются:
изменяются:
 . (13.4)
. (13.4)
Абсолютную скорость точки  находим дифференцированием выражения (13.3) по времени, считая все величины, входящие в него, переменными:
находим дифференцированием выражения (13.3) по времени, считая все величины, входящие в него, переменными:

 , (13.5)
, (13.5)
откуда с учетом формул (13.2) и (13.4) следует

| Рис. 13.2 |

|

|

|
 . (13.6)
. (13.6)
Вектор абсолютной скорости определяется по правилу параллелограмма (рис. 13.2).
Билет№9 Начало в билете№10
Теорема Кориолиса о сложении ускорений. Абсолютное ускорение точки  при произвольном переносном движении равно геометрической сумме переносного
при произвольном переносном движении равно геометрической сумме переносного  , относительного
, относительного  и кориолисова (поворотного)
и кориолисова (поворотного)  ускорений:
ускорений:
 . (13.7)
. (13.7)
Доказательство
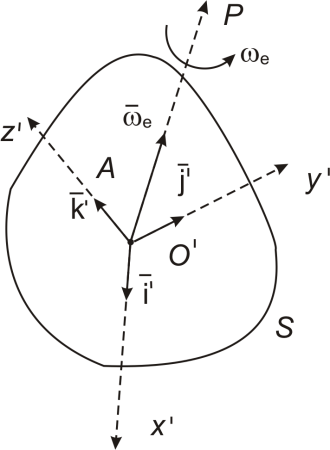
Пусть точка  движется относительно подвижной системы отсчета
движется относительно подвижной системы отсчета  , которая сама движется относительно неподвижной системы
, которая сама движется относительно неподвижной системы  (рис. 13.3).
(рис. 13.3).
 Произвольное движение твердого тела в общем случае можно представить как составное движение: переносное движение тела с какой-либо точкой
Произвольное движение твердого тела в общем случае можно представить как составное движение: переносное движение тела с какой-либо точкой  (полюсом) и вращательного движения вокруг мгновенной оси
(полюсом) и вращательного движения вокруг мгновенной оси  , проходящей через выбранный полюс.
, проходящей через выбранный полюс.
Обозначим угловую скорость вращения подвижной системы координат через  и назовем ее переносной угловой скоростью.
и назовем ее переносной угловой скоростью.
| Рис. 13.3 |
 при постоянных
при постоянных  , находим переносное ускорение:
, находим переносное ускорение:|
|
|
 . (13.8)
. (13.8)
Дифференцируя выражение (13.2) по времени  при постоянных
при постоянных  , находим относительное ускорение:
, находим относительное ускорение:
 . (13.9)
. (13.9)
Дифференцируя выражение (13.5) по времени  при всех переменных величинах, находим абсолютное ускорение:
при всех переменных величинах, находим абсолютное ускорение:

| Рис. 13.4 |

 . (13.10)
. (13.10)
Рассмотрим последний член выражения (13.10) (рис. 13.4).Заметим, что 
 является радиусом-вектором точки
является радиусом-вектором точки  относительно полюса
относительно полюса  , тогда скорость точки
, тогда скорость точки  выражается производной по времени
выражается производной по времени  .
.
С другой стороны,  .
.
Тогда  . (13.11)
. (13.11)
По аналогии имеем  ,
,  .
.
Получены формулы Пуассона для дифференцирования единичного вектора.
Следовательно,

 =
=
 13.12)
13.12)
Тогда на основании выражения (13.10) с учетом формул (13.8) и (13.9) имеем
 , (13.13)
, (13.13)
где  - ускорение Кориолиса.
- ускорение Кориолиса.
Следовательно,  . (13.14)
. (13.14)
Теорема доказана.
При поступательном переносном движении его угловая скорость равна нулю ( ), поэтому отсутствует кориолисово ускорение (
), поэтому отсутствует кориолисово ускорение ( ). Следовательно,
). Следовательно,
 , 13.15)
, 13.15)
то есть при поступательном переносном движении абсолютное ускорение точки равно геометрической сумме векторов переносного и относительного ускорений.
Вектор кориолисова ускорения  равен удвоенному векторному произведению угловой скорости переносного движения
равен удвоенному векторному произведению угловой скорости переносного движения  на относительную скорость точки
на относительную скорость точки  :
:
 . (13.16)
. (13.16)
По модулю  , (13.17)
, (13.17)
то есть модуль кориолисова ускорения  равен удвоенному произведению модулей переносной угловой скорости
равен удвоенному произведению модулей переносной угловой скорости  и относительной скорости
и относительной скорости  на синус угла между их векторами.
на синус угла между их векторами.
Кориолисово ускорение равно нулю 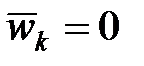 в случаях, когдав рассматриваемый момент времени:
в случаях, когдав рассматриваемый момент времени:
- переносная угловая скорость равна нулю ( ),
),
- относительная скорость равна нулю ( ),
),

|

|

|

|
 и
и  параллельны (
параллельны ( ||
||  ), то есть
), то есть  .
.
Определение направления вектора 
1.
| Рис. 13.5 |
 в данную точку, восстановить к плоскости векторов
в данную точку, восстановить к плоскости векторов  и
и  перпендикуляр и направить вдоль него вектор
перпендикуляр и направить вдоль него вектор  так, чтобы с его конца можно было видеть кратчайшее совмещение первого вектора
так, чтобы с его конца можно было видеть кратчайшее совмещение первого вектора  со вторым
со вторым  поворотом против хода часовой стрелки.
поворотом против хода часовой стрелки.
При <  =
= 
 .
.
2. Правило Н.Е. Жуковского (рис. 13.5). Для того чтобы определить направление  , надо спроектировать вектор
, надо спроектировать вектор  на плоскость, перпендикулярную к вектору
на плоскость, перпендикулярную к вектору  и повернуть эту проекцию на угол
и повернуть эту проекцию на угол  в направлении переносной угловой скорости.
в направлении переносной угловой скорости.
|
|
|
Билет№8
 Плоским движением твердого тела называется такое его движение, при котором каждая точка тела движется в одной и той же плоскости. Траектории точек являются плоскими линиями, плоскости которых параллельны между собой и параллельны одной неподвижной плоскости. Поэтому движение еще называется плоскопараллельным.
Плоским движением твердого тела называется такое его движение, при котором каждая точка тела движется в одной и той же плоскости. Траектории точек являются плоскими линиями, плоскости которых параллельны между собой и параллельны одной неподвижной плоскости. Поэтому движение еще называется плоскопараллельным.
Это движение имеет большое значение в технике, так как звенья многих механизмов совершают плоское движение. Важно изучить способы задания плоского движения, определения скоростей и ускорений.
| Рис. 14.1 |
 (рис. 14.1). Тогда прямая, перпендикулярная к этой плоскости и жестко скрепленная с движущимся телом, будет двигаться поступательно, то есть все ее точки движутся одинаково. Следовательно, для изучения движения этой прямой необходимо знать движение хотя бы одной ее точки
(рис. 14.1). Тогда прямая, перпендикулярная к этой плоскости и жестко скрепленная с движущимся телом, будет двигаться поступательно, то есть все ее точки движутся одинаково. Следовательно, для изучения движения этой прямой необходимо знать движение хотя бы одной ее точки  . Рассуждая аналогично по отношению к другим прямым, перпендикулярным к плоскости
. Рассуждая аналогично по отношению к другим прямым, перпендикулярным к плоскости  , можно утверждать, что для изучения плоского движения тела достаточно изучить движение точек тела, лежащих в плоскости
, можно утверждать, что для изучения плоского движения тела достаточно изучить движение точек тела, лежащих в плоскости  , параллельной заданной
, параллельной заданной  , которая образует плоскую фигуру.
, которая образует плоскую фигуру.
 Таким образом, для изучения плоского движения тела достаточно изучить движение плоской фигуры в ее плоскости, параллельной неподвижной плоскости
Таким образом, для изучения плоского движения тела достаточно изучить движение плоской фигуры в ее плоскости, параллельной неподвижной плоскости  .
.
В общем случае за плоскую фигуру примем всю плоскость, жестко связанную с фигурой, и рассмотрим движение ее по отношению к другой, неподвижной, плоскости.
| Рис. 14.2 |
 и направлением отрезка
и направлением отрезка  (рис. 14.2).
(рис. 14.2).
Произвольная точка  , неразрывно связанная с движущейся фигурой и выбираемая для определения ее положения, называется полюсом.
, неразрывно связанная с движущейся фигурой и выбираемая для определения ее положения, называется полюсом.
Таким образом, зная координаты полюса  и угол
и угол  , можно определить движение тела. Их величины изменяются со временем и могут быть представлены функциями
, можно определить движение тела. Их величины изменяются со временем и могут быть представлены функциями
 .
.
Эти выражения являются уравнениями плоского движения твердого тела.
Зная их, можно определить уравнения движения любой точки тела:
 ,
,
 ,
,
или
 ,
,
 ,
,
что выражает собой уравнения движения произвольной точки  плоской фигуры при движении в своей плоскости.
плоской фигуры при движении в своей плоскости.
|
|
|
