 |


Физические основы электронной дальнометрии
|
|
|
|
Введение
Некоторые общие сведения. Спутниковыми технологиями в геодезии называют совокупность методов и средств геодезических измерений с использованием искусственных спутников Земли (ИСЗ). В спутниковой геодезии существуют три основных направления:
Ÿ Лазерная спутниковая дальнометрия - измерение расстояний от наземных пунктов до ИСЗ при помощи соответствующих дальномерных устройств.
Ÿ Спутниковая альтиметрия - измерение высоты ИСЗ над земной поверхностью при помощи установленного на спутнике радиоальтиметра (радиовысотомера).
Ÿ Спутниковое позиционирование - определение местоположения (координат в пространстве) наземного пункта, неподвижного или движущегося объекта при помощи спутниковых навигационно-геодезических систем (СНГС). В случае движущегося объекта определяется, кроме координат, вектор его скорости (т.е. скорость и направление движения), а также привязка к эталонным шкалам времени.
Два первых направления имеют ограниченное применение и используются для решения различных научных задач высшей геодезии, геодинамики и пр. Третье же направление - определение координат точек на земной поверхности спутниковыми системами - получило широчайшее применение в самых различных областях человеческой деятельности. Координаты требуются не только геодезистам - они нужны и морякам, и авиаторам, и военным, и участникам различных экспедиций, и многим другим потребителям. Раньше, чтобы получить координаты, приходилось выполнять трудоемкие геодезические работы на местности, измеряя геометрические величины - расстояния, углы и превышения между точками на земной поверхности. Для передачи координат требовалось строить сети различных конфигураций, закрепляемые на местности специальными центрами,закладываемыми в верхнем слое земной поверхности, а над центрами возводить геодезические знаки (пирамиды, сигналы)- деревянные или металлические “наблюдательные вышки”, часто значительной высоты (до 30 м) для обеспечения взаимной видимости между пунктами. Появление спутниковых систем сделало - в принципе - ненужными все эти работы, совершив настоящую революцию в геодезии. Имея спутниковый приемник, мы получаем возможность сразу же определить координаты места его установки с точностью порядка десятков метров, что достаточно для многих навигационных задач, а при наличии двух приемников получить “геодезическую” точность определения их взаимного положения - до сантиметров и даже миллиметров. Это позволяет создавать опорные сети, выполнять съемочные и привязочные работы гораздо более эффективно по сравнению с традиционными методами.
|
|
|
Все вышеупомянутые направления спутниковых технологий с аппаратурной точки зрения основаны на достижениях геотроники - электронных методов геодезических измерений, и в первую очередь, на использовании методов наиболее развитой области геотроники - электронной дальнометрии. Эти методы, разработанные вначале для наземной геодезии, в случае спутниковых измерений претерпели, особенно при спутниковом позиционировании, существенные изменения, обусловленные спецификой применения на космических трассах.
Для студентов специальности “Городской кадастр” наибольший интерес представляет именно спутниковое позиционирование, так как при кадастровых съемках и решении различных задач землепользования требуется получать координаты точек на земной поверхности, а не расстояния до спутников или высоту спутников над Землей. Поэтому в данном курсе мы будем изучать спутниковые навигационно-геодезические системы.
|
|
|
Историческая справка. Разработка систем спутникового позиционирования началась в конце 50-х годов ХХ столетия, вскоре после запуска первого советского искусственного спутника Земли. Этот спутник был запущен в 1957 году, а уже в декабре 1958 г. в США была начата программа создания спутниковой навигационной системы NNSS (Navy Navigation Satellite System), предназначенной для военно-морского флота (ВМФ - Navy) США как всепогодное средство навигационного обеспечения кораблей ВМФ и в первую очередь - атомных подводных лодок, вооруженных ракетами “Поларис”. Позже эта система получила название “Транзит” (TRANSIT). Она была сдана в эксплуатацию в 1964 г., а с 1967 г. была открыта для гражданского коммерческого использования. Система “Транзит” содержала 6 спутников, выведенных на почти круговые полярные орбиты со средней высотой порядка 1075 км и наземный командно-измерительный комплекс с четырьмя станциями слежения. Аппаратура потребителей - приемоиндикаторное устройство или, проще, приемник - могла устанавливаться на неограниченном количестве подвижных объектов (необязательно на кораблях). В 70-х годах фирмой “Магнавокс” (США) были выпущены малогагаритныеприемники “Геосивер” (GEOCEIVER), позволившие определять координаты с дециметровой точностью. “Транзит” - система допплеровского типа, т.е. основанная на использовании известного из физики эффекта Допплера - изменения частоты регистрируемых приемником волн, излучаемых источником, при изменении расстояния между источником и приемником. В этом случае координаты приемника получают по нескольким разностям расстояний от приемника до различных положений спутника при его движении, определяя эти разности из интегрирования допплеровского сдвига частоты. Допплеровские системы являются, как часто говорят, разностно-дальномерными или просто разностными. Система “Транзит” сыграла очень большую роль в навигации, ее услугами пользовались тысячи потребителей в различных странах. Получила известность также допплеровская система “Геос” (GEOS). В СССР в 1967 г. начала разрабатываться допплеровская система “Цикада”, введенная в эксплуатацию в 1979 г. Как и “Транзит”, она сначала предназначалась для военного применения и в последующем была открыта для гражданского использования.
|
|
|
Все эти системы обеспечивали точность получения координат порядка 50-100 м, а в отдельных случаях и более высокую. Главным их недостатком была малая оперативность измерений: для достижения высокой точности требовалось несколько прохождений ИСЗ в “поле зрения” приемника, а перерывы между прохождениями спутников, например, в системе “Транзит” составляли полтора часа. Это послужило побудительным мотивом к разработке систем второго поколения - так называемых глобальных спутниковых систем.
Глобальные системы обеспечивают получение координат в любой точке Земли в любой произвольный момент времени. Это стало возможным благодаря увеличению высоты орбит спутников до 20 тыс. км и увеличению числа самих спутников до 24. Вследствие этого в любой точке земного шара может одновременно наблюдаться не менее 4-х спутников - минимально необходимое количество для определения координат наземного приемника; практически очень часто их наблюдается больше, что дает возможность выбирать их оптимальные конфигурации.
В настоящее время в мире существуют две глобальные системы: американская - GPS и отечественная - ГЛОНАСС.
GPS (Global Positioning System - Глобальная Система Позиционирования) первоначально называлась NAVSTAR. Это название переводится не как “Навигационная звезда”, а более прозаично: это аббревиатура, составленная из слов NAVigation System with Timing And Ranging - навигационная система с измерением времени и дальности. Аббревиатура же GPS означает, вообще говоря, не какую-то конкретную систему, а новый класс систем - глобальные системы позиционирования, и поэтому в зарубежной литературе еще не так давно писали: GPS NAVSTAR, GPS GLONASS. Однако вскоре буквами GPS стали называть только систему NAVSTAR, и сейчас это общепринято.
Начало разработки GPS относится к 1973 году. Система находится в ведении Министерства обороны США. Пробный запуск первых четырех спутников был осуществлен в 1978 году, запуск серийных спутников начался с 1986 г. Полная эксплуатационная готовность объявлена в 1995 г. До недавнего времени система была открыта для гражданского использования только в режиме пониженной точности; для режима высокой точности требовался санкционированный доступ. В мае 2000 г. это ограничение было снято, и сейчас GPS открыта для всех и в режиме высокой точности. Однако это относится к работе системы в навигационных режимах. Вскоре после начала создания GPS была обнаружена возможность измерений в “геодезическом” режиме, названном так из-за резкого повышения точности, причем для этого не требуется никаких разрешающих санкций, а нужно лишь определенным образом построить приемник. Это дало основание называть GPS навигационно-геодезической системой.
|
|
|
ГЛОНАСС (ГЛОбальная Навигационная Спутниковая Система) начала разрабатываться в середине 70-х годов. Первые ее спутники серии “Космос” выведены на орбиты в 1982 г. В 1993 г. началось официальное использование системы с промежуточным созвездием спутников. Штатная эксплуатация с полным созвездием из 24 спутников началась в конце 1995 г. В ГЛОНАСС навигационный режим повышенной точности оставлен для санкционированных пользователей (военных), а режим пониженной (“стандартной”) точности доступен любым гражданским пользователям. Как и в GPS, возможны измерения в геодезическом режиме с соответствующими приемниками.
Глобальные системы - это системы не допплеровского (разностно-дальномерного), а дальномерного типа (хотя в них используется и допплеровский режим для вспомогательных целей). Чтобы ясно представлять себе работу глобальных систем, необходимо вначале познакомиться с некоторыми ключевыми принципами электронной дальнометрии, справедливыми как для наземных, так и для спутниковых измерений.
Физические основы электронной дальнометрии
Общие принципы. Измерение расстояний электронными дальномерами основано на определении времени и скорости распространения электромагнитных волн вдоль измеряемой дистанции. В наземной дальнометрии, а также в лазерной спутниковой дальнометрии и спутниковой альтиметрии электромагнитные волны (радио- или оптического диапазона) проходят измеряемое расстояние D дважды - в прямом и обратном направлениях. Для этого аппаратура на одном конце измеряемой линии содержит передатчик и приемник, а на другом конце - отражатель. В спутниковой дальнометрии отражатель устанавливается на спутнике, а в спутниковой радиоальтиметрии, наоборот, на спутнике устанавливается приемо-передатчик, а отражателем радиоволн служит земная, в частности, водная поверхность. Во всех этих случаях в основе измерения расстояния D лежит соотношение:
|
|
|
D = vt /2, (1.1)
где v - скорость распространения электромагнитных волн, t - время распространения вдоль дистанции в прямом и обратном направлениях.
Любая дальномерная аппаратура доставляет информацию о времени распространения t, а скорость v находят из соотношения v = с/n по известному значению скорости света в вакууме с = 299792458 м/с и показателю преломления воздуха n, который можно вычислить, измерив температуру, давление и влажность (для световых волн надо знать еще длину волны).
Дальномеры измеряют либо непосредственно временной интервал t, либо другой параметр, являющийся определенной функцией этого временного интервала.
Физическая сущность всех методов измерения расстояний заключается в сравнении одного и того же параметра, связанного с электромагнитным излучением, до и после прохождения излучением измеряемой дистанции. В случае двойного прохождения измеряемой линии (т.е. при использовании отражателя) один и тот же сигнал от передатчика направляется на приемник одновременно по двум различным путям: непосредственно (без выхода на дистанцию) и через измеряемую дистанцию (рис.1.1).

Рис. 1.1. Общая схема измерения расстояний при помощи электромагнитных волн
Первый путь называют опорным каналом или трактом, а идущий по нему сигнал - опорным сигналом. Второй путь образует дистанционный (информационный) канал, и соответственно приходящий от отражателя сигнал называют дистанционным или информационным сигналом. В приемнике осуществляется сравнение опорного и информационного сигналов по избранному параметру, или, другими словами, измеряется их различие по этому параметру, которое и содержит информацию об измеряемом расстоянии. Выбор параметра определяет метод измерения расстояния. Такими параметрами чаще всего являются: а) время прихода импульса излучения (при импульсном излучении), б) фаза колебания (при непрерывном излучении). В последнем случае это может быть или фаза гармонического (синусоидального) колебания, непосредственно излучаемого передатчиком, или, если это колебание (называемое несущим), модулировано, - фаза модулирующего сигнала. Соответственно различают следующие методы измерения расстояний:
- временной (импульсный), с измерением непосредственно времени распространения импульса;
- фазовый с измерением разности фаз на несущей частоте;
- фазовый с измерением разности фаз на частоте модуляции.
Временной метод. Схема его реализации показана на рис.1.2. Передатчик излучает короткий импульс, который разделяется на два - опорный и направляемый на дистанцию. Опорный импульс запускает измеритель временных интервалов, а возвратившийся с дистанции через время tимпульс останавливает счет времени. Расстояние вычисляется непосредственно по соотношению (1.1).

Рис. 1.2. Схема реализации временного метода измерения расстояний
Импульсный метод характеризуется сравнительно большой абсолютной погрешностью, возникающей из-за трудности получения импульсов малой длительности с крутым фронтом. Погрешность при измерении t, равная 10 нс, дает ошибку в расстоянии 1,5 м. Поэтому импульсный метод выгодно использовать для измерения больших расстояний, когда относительная погрешность измерения получается малой. Наиболее эффективно применение импульсного метода в оптическом диапазоне для измерения очень больших расстояний, в частности, до ИСЗ, что и используется в лазерной спутниковой дальнометрии. Так как расстояния велики, то лазерный импульс должен быть очень большой мощности; она тем больше, чем меньше длительность импульса. Для измерения расстояний до ИСЗ применяются твердотельные лазеры. Долгое время типичное значение длительности импульса составляло примерно 10 нс при пиковой мощности до 100 Мвт. В последнем поколении таких дальномеров применяются пикосекундные твердотельные лазеры на гранате, генерирующие оптические импульсы сверхкороткой длительности порядка десятков пикосекунд (1пс = 10-12 с) с пиковой мощностью до нескольких гигаватт (1 Гвт = 109 Вт). За время в 1 пс свет проходит 0,3 мм, и применение пикосекундных лазеров обеспечивает резкое повышение точности импульсного метода. Недавно разработаны уже фемтосекундные лазеры (1фс =10-15 с, что меньше периода колебаний видимого света!), длительность импульсов которых составляет сотни фемтосекунд и менее, но проблема регистрации таких импульсов чрезвычайно сложна, и пока что фемтосекундные лазеры в дальномерах не применяются.
Фазовый метод на модулированном излучении. Этот метод используется во всех наземных геодезических и топографических светодальномерах и радиодальномерах, предел дальности действия которых может лежать в диапазоне от нескольких километров до нескольких десятков километров. Источник света или радиоволн излучает несущие гармонические колебания вида А sin (w t + j о), где А - амплитуда, w = 2pf - круговая частота (f - частота в герцах), j о - начальная фаза. Но перед выходом излучения на дистанцию какой-либо из этих параметров (в светодальномерах обычно амплитуда А, определяющая интенсивность света, а в радиодальномерах - частота f) подвергается периодическому изменению (модуляции), обычно по синусоидальному закону, с некоторой частотой F, намного меньшей несущей частоты f. То есть, например, в светодальномерах интенсивность выходящего на дистанцию света становится то больше, то меньше, и это происходит с частотой модуляции F. Этот случай проиллюстрирован на рис.1.3, из которого видно, что в световом потоке возникает огибающая (показана пунктиром) - синусоида частоты F.

Рис.1.3. Амплитудная модуляция излучения по синусоидальному закону с частотой F
Фаза этой синусоиды после прохождения светом расстояния 2D (до отражателя и обратно) будет отличаться от фазы в момент излучения на величину j, зависящую от времени распространения t:
j = 2p Ft = 2p F(2D/v). (1.2)
Эту разность фаз измеряют фазометром, включенным между передатчиком и приемником. Из (1.2) следует, что искомое расстояние D можно вычислить по формуле:
D = (v/2F)(j /2p). (1.3)
На рис.1.4 показана обобщенная схема реализации фазового метода с измерением разности фаз на частоте модуляции F.
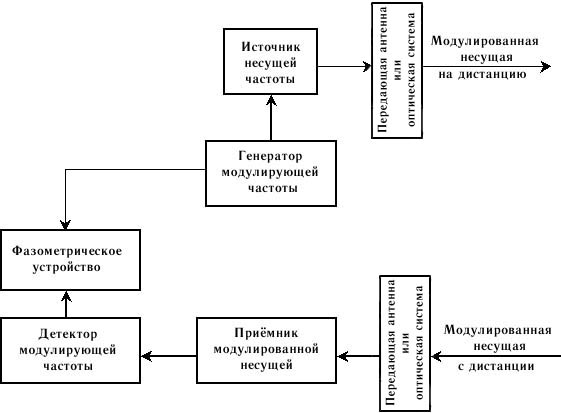
Рис.1.4. Функциональная схема фазового дальномера
Поскольку фаза - угловая величина, значение которой повторяется через каждые 360о, т.е. 2p, то общий фазовый сдвиг j в формуле (1.3) можно представить в виде:
j = 2p N + D j, (1.4)
где N - целое число полных фазовых циклов по 2p, а D j - дробная часть цикла, меньшая 2p. Любой фазометр может измерить разность фаз только в пределах от 0 до 2p, т.е. только D j. Число же N остается неизвестным.
Подставляя (1.4) в (1.3), получаем основное уравнение фазовой дальнометрии:
D = (v/2F)(N + D j /2p), (1.5)
в котором два неизвестных: D и N. Такое уравнение не имеет однозначного решения, и возникает так называемая проблема разрешения неоднозначности (часто используют также термин многозначность) - проблема определения целого числа N. Его можно определить, если выполнить измерения на нескольких частотах модуляции F.
Уравнение (1.5) часто записывают в более простом виде:
D = (l /2)(N + D N), (1.6)
где l = v/F - длина волны модуляции, D N = D j /2p - дробь, меньшая единицы.
Для светодальномеров и радиодальномеров длина волны модуляции может лежать в диапазоне от 0,6 м до 20 м, что соответствует частоте F от 500 МГц до 15 Мгц. Чем больше F, тем точнее дальномер. Несущая же частота f гораздо выше, чем F, и, соответственно, длина волны несущей v/fгораздо меньше длины волны модуляции v/F. Так, в большинстве радиодальномеров несущая волна составляет 3 см (f = 10 000 МГц = 1010 Гц), а в светодальномерах длина волны несущей - это длина волны света, которая, например, при использовании гелий-неонового (Не-Nе) лазера равна 0,63 мкм. Это красный свет с частотой f ” 5·1014 Гц. Таким образом, с принципиальной точки зрения светодальномеры и радиодальномеры отличаются лишь длиной волны несущих колебаний - в радиодальномерах она на 4-5 порядков больше, чем в светодальномерах. Но такое различие всего лишь в одном параметре приводит к резкому несходству этих приборов в схемном и конструктивном отношениях, так как для оптических волн и радиоволн применяются совершенно разные методы передачи, модуляции и приема.
Фазовый метод на несущей частоте. При этом методе работают на немодулированном излучении, измеряя разность фаз излучаемых и принимаемых электромагнитных волн. Фазовые измерения на не слишком высокой несущей частоте, соответствующей диапазону длинных и средних радиоволн, часто используются в радиогеодезических системах (РГС), предназначенных для определения координат подвижных объектов на море, на земле и в воздухе (кораблей, самолетов, автотранспортных средств); однако, в настоящее время РГС в значительной степени вытеснены спутниковыми системами. Фазовый метод на несущей частоте в оптическом диапазоне называется интерференционным, ибо он основан на непосредственной регистрации результата интерференции двух световых пучков - опорного и дистанционного (дважды прошедшего измеряемую дистанцию). Интерференционный дальномер - это лазерный интерферометр с частотно-стабилизированным Не-Nе лазером. Интерферометр построен по известной из оптики схеме Майкельсона с опорным и дистанционным отражателями. Процедура измерения заключается в перемещении дистанционного отражателя вдоль всей измеряемой длины D и подсчете числа интерференционных полос, проходящих через центр фотоприемника при движении отражателя. Интерференционная картина смещается на одну полосу при перемещении отражателя на половину длины волны света, и, следовательно, формула для D полностью совпадает с формулой (1.6), но теперь в ней l - это длина волны света, а не модуляции, и в этом заключается принципиальное отличие интерферометра от светодальномера. Величина же (N+D N) - это количество прошедших интерференционных полос, которое в большинстве применений достаточно определять с точностью до целого числа N. Этот метод пригоден для измерения расстояний в десятки и сотни метров и является наиболее высокоточным из всех существующих методов линейных измерений. Однако необходимость “прокатки” отражателя вдоль всей трассы требует сооружения точных направляющих, и поэтому лазерные интерферометры используются только при создании стационарных метрологических базисов для калибровки электронных дальномеров.
И, наконец, фазовые измерения на несущей частоте в диапазоне дециметровых радиоволн при однократном прохождении их вдоль трассы являются основным способом измерений в глобальных спутниковых системах при их работе в геодезическом (не навигационном) режиме, что будет подробно рассмотрено ниже в разделе “Фазовые измерения”.
|
|
|
