 |


Вопрос 30: Компоновки приводов главного движения для станков нормальной и высокой точности.
|
|
|
|
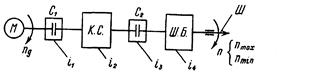
Приводы главного движения различаются в основном по типу двигателя, компоновке, по способу регулирования и переключения частот вращения. Общая структурная схема привода главного движения представлена на рис. 5.32. Наличие и вид тех или иных элементов в конкретном приводе в первую очередь определяется технологическим назначением станка, его общей компоновкой и системой управления.
Передаточный механизм должен иметь общее передаточное отношение  , где
, где
 — передаточные отношения соответствующих устройств передаточного механизма.
— передаточные отношения соответствующих устройств передаточного механизма.
Соединение двигателя с коробкой С1 (с передаточным отношением i) выполняется в зависимости от компоновки станка в виде ременной или зубчатой передачи либо соединительной муфты. Коробка скоростей (КС) при нерегулируемом двигателе (М) предназначена для изменения передаточного отношения привода, чтобы получить на шпинделе различные скорости вращения в пределах от птт до «шах, щк т.е. 12 настраивается в соответствии с режимами резания.
При разделенном приводе шпиндель станка (Ш) располагается в отдельном корпусе шпиндельной бабке (Ш.Б.). В зависимости от требований по плавности вращения шпинделя, а также величины передаваемого момента соединение С2выполняется в виде ременной или зубчатой передачи с передаточным отношением  - Иногда в этом случае в шпиндельной бабке имеются переключаемые зубчатые передачи (перебор) с общим передаточным отношением
- Иногда в этом случае в шпиндельной бабке имеются переключаемые зубчатые передачи (перебор) с общим передаточным отношением  (рис. 5.33). Высокие частоты вращения ( = 1) шпиндель получает от коробки скоростей через ременную передачу при включении муфты А влево (при* этом колеса Z2и Z3выключаются за счет осевого смещения втулки Б, на которой они закреплены). При выключении муфты и включении зубчатых колес Z2и Z3шпиндель получает малые частоты вращения и
(рис. 5.33). Высокие частоты вращения ( = 1) шпиндель получает от коробки скоростей через ременную передачу при включении муфты А влево (при* этом колеса Z2и Z3выключаются за счет осевого смещения втулки Б, на которой они закреплены). При выключении муфты и включении зубчатых колес Z2и Z3шпиндель получает малые частоты вращения и  . Разделенный привод применяется в точных станках небольшого и среднего размера, когда не требуется осевого перемещения шпиндельной бабки.
. Разделенный привод применяется в точных станках небольшого и среднего размера, когда не требуется осевого перемещения шпиндельной бабки.
|
|
|
При неразделенном приводе отсутствует отдельная коробка скоростей, а зубчатые передачи, служащие для изменения общего передаточного отношения, располагаются в шпиндельной бабке (рис. 5.34,а). В этом случае шпиндельная бабка может называться коробкой скоростей. Коробка скоростей, показанная на рис. 5.34, в зависимости от положения зубчатых блоков позволяет получить 12 различных частот вращения шпинделя и ее передаточное отношение  .
.

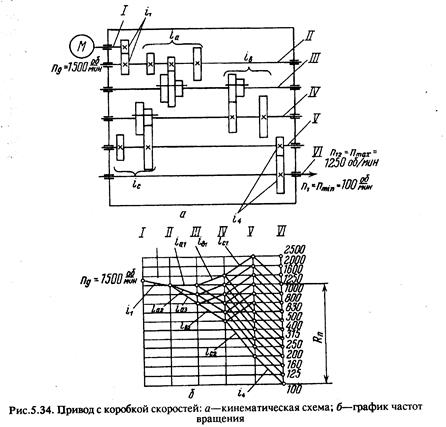
По сравнению с разделенным привод упрощается, однако ухудшается плавность вращения шпинделя, так как обычно применяется зубчатая (иногда косозубая) передача на шпинделе с передаточным отношением ременную передачу применить сложно. Кроме того, тепло, выделяемое в коробке скоростей, отрицательно сказывается на работе шпиндельного узла.
В качестве источника движения в станках чаще всего применяется электродвигатель, его расположение относительно коробки скоростей определяет тип соединения С1(см. рис. 5.32). При ременной передаче двигатель может быть расположен рядом со станком либо на станке в удобном месте. Возможно соединение двигателя с коробкой скоростей с помощью соответствующих муфт либо фланцевая его установка. В отдельных случаях привод выполняется в виде унифицированного узла—электрошпинделя (мотор-шпиндель), ротор электродвигателя, в котором насаживается непосредственно на шпиндель.
Вопрос 31: Графоаналитический расчет коробок скоростей. Граничные условия.
С учетом необходимости получения оптимальных по режимам резания скоростей для различных диаметров обработки привод должен обеспечивать любую частоту вращения шпинделя n = (1000v/πD) в пределах выбранного диапазона регулирования Rn, т.е. требуется бесступенчатое регулирование частоты его вращения.
|
|
|
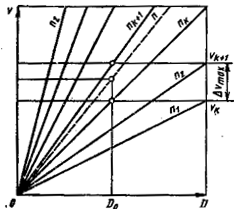
Рис. 12.5 Диаграмма частоты вращения шпинделя при ступенчатом регулировании
Однако существующие способы бесступенчатого регулирования отличаются повышенной стоимостью, а при использовании механических вариантов — низкой надежностью и повышенными потерями.
Поэтому в настоящее время в станках, особенно общего назначения и без числового управления, пока еще широко применяют приводы со ступенчатым регулированием с асинхронными нерегулируемыми электродвигателями. Основные их достоинства — небольшая стоимость, высокий КПД, компактность, жесткость характеристики, возможность получения постоянства мощности на всем диапазоне регулирования. При том промежуточные значения частот вращения выбирают, как правило, по закону геометрической прогрессии.
Целесообразность применения геометрического ряда частот вращения была обоснована акад. А. В. Гадолиным в 1876 г., исходя из обеспечения постоянства потери экономически выгодной скорости для всех интервалов ряда, что обеспечивает постоянство потери технологической производительности при прочих равных условиях обработки.
В координатах v и D (рис. 12.5) геометрический ряд с частотами
n1=nmin,
n2=nmin,
n3=n2φ=n1φ2,
………………..
nk=nk-1 φ=n1 φk-1,
………………..
nz=n1 φ z-1=nmax, (12.8)
где z — число ступеней скорости, а φ — const — знаменатель ряда частот вращения, представляется в виде совокупности прямых линий  , проходящих через начало координат.
, проходящих через начало координат.
Следовательно, при обработке заготовки размером D0 может возникнуть потеря экономически выгодной скорости ∆v, которая будет наибольшей, если выбранная скорость v→vk+1 не может быть превышена исходя из условий резания (например, по условию обеспечения требуемой стойкости инструмента). При этом ∆vmax=vk+1 – vk, а наибольшая относительная потеря скорости и пропорциональная ей потеря производительности
 (12.9)
(12.9)
Для геометрического ряда частот вращения число ступеней z скорости может быть определено из соотношения
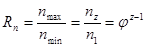 (12.10)
(12.10)
Отсюда
 (12.11)
(12.11)
Вычисленную по этой формуле величину z округляют до целого, не всегда ближайшего числа, что приводит к некоторому изменению действительного диапазона регулирования Rn. Геометрический ряд частот вращения шпинделя обладает и структурными преимуществами. Ступенчатое регулирование целесообразно осуществлять последовательно включенными группами зубчатых передач в виде двойных и тройных блоков; при этом из закономерных рядов частот вращения шпинделя можно осуществить только геометрический ряд.
|
|
|
| φ | Е1 | Е2 | 
|
| 1,06 | |||
| 1,12 | |||
| 1,26 | |||
| 1,41 | 20/3 | ||
| 1,58 | 3/2 | ||
| 1,78 | 6/5 | ||
| 20/6 |
12.1 Стандартные значения знаменателя геометрического ряда при заданных значениях числа членов ряда
В станкостроении все значения знаменателя φ, как и сами ряды частот вращения, стандартизованы. При установлении значений φ, которые лежат в пределах 1 <>φ  2,учитывали стандартные десятичные ряды предпочтительных чисел, т.е. φ =
2,учитывали стандартные десятичные ряды предпочтительных чисел, т.е. φ =  , где Е1 — целое число членов ряда в десятичном интервале, равное 40, 20, 10, 5, 4. Кроме того, для возможности применения двухскоростных электродвигателей с отношением синхронных частот вращения, равным 2, необходимо выдерживать принцип удвоения частот в ряду, т. е. φ =
, где Е1 — целое число членов ряда в десятичном интервале, равное 40, 20, 10, 5, 4. Кроме того, для возможности применения двухскоростных электродвигателей с отношением синхронных частот вращения, равным 2, необходимо выдерживать принцип удвоения частот в ряду, т. е. φ =  , где E2 — целое число. Тогда, если в ряду частот есть член пх, то будет также член пy = 2пх = пxφE2 т. е. Е2 — число членов ряда в двоичном интервале.
, где E2 — целое число. Тогда, если в ряду частот есть член пх, то будет также член пy = 2пх = пxφE2 т. е. Е2 — число членов ряда в двоичном интервале.
Стандартные значения знаменателя ряда приведены в табл. 12.1, там же указаны величины потерь экономически выгодной скорости. Малые значения знаменателя ряда приводят к существенному усложнению привода, что экономически оправдывает применение систем бесступенчатого регулирования, поэтому φ = 1,06 в станках практически не применяют; φ = 1,12 применяют преимущественно в станках с числовым управлением и в тяжелых станках, где требуется более точная настройка на заданный режим. Наибольшее распространение получили значения φ = 1,25 и φ = 1,4; φ = 1,58 и φ = 1,8 применяют в специализированных станках, где велико вспомогательное время и поэтому точное установление скорости не обязательно; φ = 2 практически не применяют, так как потеря производительности в этом случае достигает 50 %.
|
|
|
Для того чтобы кинематическая цепь привода шпинделя обеспечивала геометрический ряд частот вращения в расчетном диапазоне Rnc выбранным φ при последовательно включенных между смежными валами групповых передачах (рис. 12. 6), необходимо выполнение ряда закономерностей.

Рис. 12.6. Привод главного движения при ступенчатом регулировании частот вращения:
а — кинематическая схема; б — варианты структурных сеток; в — график частот вращения
Общее число ступеней скорости
 (12.12)
(12.12)
где pk— число отдельных передач в каждой группе; т — число групп передач.
Общий диапазон регулирования
 (12.13)
(12.13)
где imax, imin — соответственно наибольшее и наименьшее передаточное отношение привода;  ,
,  — соответственно наибольшее и наименьшее передаточное отношение в k-й группе передач;
— соответственно наибольшее и наименьшее передаточное отношение в k-й группе передач;
Rk =  / диапазон регулирования k-й группы.
/ диапазон регулирования k-й группы.
Передаточные отношения передач в любой группе должны строиться по закону геометрической прогрессии со знаменателем
φk=Rk-1φ=φxk, (12.4)
а именно
 (12.15)
(12.15)
где Rk-i — диапазон регулирования совокупности передач, кинематически включаемых ранее данной группы; xk — характеристика группы, определяющая ряд передаточных отношений, т.е. порядок ее кинематического включения. Диапазон регулирования группы
 (12.16)
(12.16)
В порядке кинематического включения различают основную группу передач с числом отдельных передач р0, которая обеспечивает начальный ряд частот вращения со знаменателем φ0 =φ. Для нее характеристика xk = х0 = 1, ряд передаточных отношений i1: i2: i3:... = 1: φ: φ2: …, а диапазон регулирования R0 = φ(p0-1). Множительные (переборные) группы служат для расширения (размножения) начального ряда частот до требуемого диапазона Rn и числа ступеней z.
Первая переборная группа с числом передач р1 имеет характеристику x1 = ро при φ1= R0φ = φ(p0-1)φ = φр0 и обеспечивает ряд передаточных отношений i1: i2: i3:... = 1: φр0: φ2р0: …, Диапазон ее регулирования R 1 = φ1(p1-1) = φр0(p1-1) .
Вторая переборная группа с числом передач р2 имеет характеристику х2 — pop1и знаменатель ряда передаточных отношений φ2 = R0R1φ= φрор1, обеспечивая ряд передаточных отношений i1: i2: i3:... = 1: φр0р1: φр0р1:…; диапазон ее регулирования R2 = φ (р2-1) = φр0р1(р2-1).
Различные варианты привода для данного числа z, учитывающие порядок конструктивного расположения и кинематического включения групп, удобно характеризовать формулой структуры привода. Она получается, если в формуле (12.12) записать группы Rk в порядке их конструктивного расположения, а индексы ставить в соответствии с порядком их кинематического включения.
|
|
|
Для облегчения кинематического расчета привода применяют. графоаналитический метод, основанный на последовательном построении двух графиков: графика структуры (структурная сетка) и графика частот.вращения. Графики строят в логарифмических координатах с расстоянием (интервалом) между соседними горизонталями, соответствующими определенным частотам ряда п, равным
lg nk+1 – lg nk = lg φ = const. (12.17)
При этом все передаточные отношения и диапазоны регулирования в приводе, которые представляют собой целые степени знаменателя φ, определяются соответствующим количеством этих интервалов.
Последовательно расположенные валы привода условно изображают вертикальными линиями; лучи, соединяющие точки пересечения на вертикалях, соответствуют передаточным отношениям отдельных передач между соответствующими валами; число лучей, выходящих из одной точки — числу отдельных передач между валами, число точек на линии вала — числу различных ступеней скорости на нем.
Структурную сетку строят в соответствии с выбранной формулой структуры привода и учитывают только валы групповых передач. В ней находит отражение относительная связь между передаточными отношениями в группах в соответствии с условием (12.15), поэтому лучи для каждой группы проводят симметрично, а количество интервалов между их концами численно равно характеристике группы, определяемой в соответствии с формулой структуры. На рис. 12.6, б приведены теоретически возможные структурные сетки для привода, изображенного на рис. 12.6, а в соответствии с конструктивным вариантом z = 3x2x2. Под каждым вариантом записана формула структуры, а над каждым полем, отведенным для соответствующей групповой передачи, записаны число передач и характеристика группы.
Общее число структурных вариантов для определенной конструктивной схемы равно числу перестановок из т групп, т. е. m!, но для заданного числа групп m можно построить (m!/q!) различных конструктивных вариантов, где q – число групп с одинаковым числом передач. Следовательно, общее число вариантов структур для привода, содержащего т групп, равно
 , (12.18)
, (12.18)
т. е. для привода с z = 12, где т = 3, a q = 2, общее число вариантов; равно 18.
График частот вращения (рис. 12.6, в) строят в соответствии с разработанной с учетом служебного назначения станка кинематической схемой. Он отражает частоты вращения всех валов привода, включая валы одиночных передач, необходимых для его компоновки. Построение начинают с цепи редукции imin, обеспечивающей снижение частоты вращения электродвигателя nэ до п1 = nmin на шпинделе. Для дальнейшего построения используют структурную сетку. Передаточное отношение передачи определяется выражением φk, где k, учитывая логарифмический характер графика, — число интервалов между горизонталями, перекрытых лучами, соединяющими отметки частот вращения на соседних валах. Для повышающей передачи k > 0, для понижающей k < 0, для передачи с i= 1 k = 0. При проведении лучей учитывают ограничения по предельно допустимым значениям передаточных отношений для зубчатых передач. Для прямозубых передач в приводе главного движения обычно принимают
 , (12.19)
, (12.19)
 . (12.20)
. (12.20)
Эти условия ограничивают допустимый диапазон регулирования групповой передачи, который с учетом соотношения (12.16) можно записать в виде
 . (12.21)
. (12.21)
Последнее соотношение позволяет уже на стадии построения структурных сеток отбросить ряд непригодных вариантов. При выборе структуры и при построении графиков частот вращения следует учитывать, что размеры валов и модули зубчатых колес связаны с частотой вращения следующими зависимостями:


где С1 и С2 — соответствующие постоянные.
Поэтому для уменьшения габаритных размеров и массы привода желательно, чтобы большее число его элементов работало в области более высоких частот вращения. Этому соответствуют приводы, у которых число передач в группах уменьшается, а характеристика увеличивается вдоль цепи передач от электродвигателя к шпинделю. Кроме того, рекомендуется цепь редукции imin строить так, чтобы выполнялось условие
 , (12.22)
, (12.22)
Для уменьшения радиальных размеров передач, которые определяют размеры корпусных деталей привода, лучшим вариантом будет тот, у которого для каждой группы выдерживается соотношение imax/imin=1. Для уменьшения числа валов в приводе и зубчатых колес следует уменьшать число групп передач, которое получится минимальным, если
 , (12.23)
, (12.23)
При выборе варианта привода необходимо учитывать также его КПД, возникающие при переходных процессах динамические нагрузки, определяемые значением приведенного момента инерции вращающихся масс и длиной кинематических цепей. Во многих случаях это вынуждает прибегать к специальным структурам. (Металлорежущие станки: Учебник для машиностроительныхвтузов/Под.редВ.Э.Пуша.-М.:Машиностроение,1985.- 256с.,ил.)
|
|
|
