 |


Вопрос 33: Проеектирование приводов главного движения с использованием многоскоростных электродвигателей.
|
|
|
|
Особенности применения многоскоростных электродвигателей, электродвигателей постоянного тока и вариаторов в приводе станков. В приводе главного движения и подач различных металлорежущих станков применяют, как указывалось выше, многоскоростные электродвигатели, двигатели постоянного тока, а также вариаторы. В случае применения указанных двигателей и передач в приводе станков, при определении основных технических характеристик и при разработке кинематической схемы станка необходимо учитывать некоторые их особенности.
Многоскоростные электродвигатели. В станках используют двух-, трех- и четырехскоростные электродвигатели, причем у одних электродвигателей частоты вращения изменяются при переключении полюсов в два раза (например, nсинхр = 750/1500, 1500/3000, 750/1500/3000 об/мин), у других — в другом отношении (например, псинхр = 750/1000/1500, 500/1000/1500/3000, 500/750/1000/1500 об/мин).
Для получения на станках геометрического ряда частот вращения (чисел двойных ходов, подач) можно применять только электродвигатели с удваивающейся частотой вращения, на которые ориентирован выбор стандартных значений. Не нарушая геометрического ряда, можно использовать только ф = 1,06; 1,12; 1,26; 1,41; 2, так как ф= V/2. Электродвигатели, у которых частоты вращения изменяются не в два раза, не могут быть ļдвойных ходов) и величины подач находят путем подбора
(с некоторым отклонением от геометрического ряда). При применении в приводе станка многоскоростного электродвигателя и коробки скоростей число ступеней скорости

где у — число ступеней электродвигателя; т = КЕ2 — число ступеней коробки; К — целое число.
Так как уК =  , то число ступеней скорости z должно быть ратным числу Е2, а частное должно делиться на 2 или 3 соответственно числу ступеней скорости выбранного электродвигателя. Например, при z = 24 и φ = 1,12 Е2 = 6 и уК =
, то число ступеней скорости z должно быть ратным числу Е2, а частное должно делиться на 2 или 3 соответственно числу ступеней скорости выбранного электродвигателя. Например, при z = 24 и φ = 1,12 Е2 = 6 и уК =  =4, т.е. возможны два решения:
=4, т.е. возможны два решения:
|
|
|
Y=2, К=2 и m=2*6=12;
Y=4, К=1 и m=1*6=6.
Четырехскоростных электродвигателей с удваивающейся частотой вращения нет. Таким образом, только при определенны; сочетаниях z, φ, y может быть сохранен геометрический ряд частот вращения шпинделя (чисел двойных ходов) и подач. В случае применения многоскоростного электродвигателя его рассматривают как электрогруппы с числом передач РЭ характеристикой хэ и знаменателем ряда φ э = 2. Следовательно, вариант структурной формулы будет иметь следующий вид:
Z=Р Э [ хэ ] Р 1 [ х1 ] Р 2 [ х2 ] Р 3 [ х3 ]…,
где Р1 P2 Р 3 …, —число передач в группах; х1 х2, х3,... - характеристики групп.
Характеристика электрогруппы (для возможности получения геометрического ряда) хэ = Е2 =  , поэтому при φ = 2 хэ = Е2 = 1, Рэ — основная группа; при φ = 1,41 хэ = Е2 = 2, э — первая переборная группа; при φ = 1,26 хэ = Е2 == 3,Рэ — первая переборная группа; при φ = 1,12 хэ = 6, Рэ —
, поэтому при φ = 2 хэ = Е2 = 1, Рэ — основная группа; при φ = 1,41 хэ = Е2 = 2, э — первая переборная группа; при φ = 1,26 хэ = Е2 == 3,Рэ — первая переборная группа; при φ = 1,12 хэ = 6, Рэ —
вторая переборная группа; при φ = 1,06 хэ =Е2 = 12, Рэ -вторая и последующие переборные группы.
Если электрогруппа Рэ не является основной, то хэ == Р1 P2…, т. е. равна произведению чисел передач групп, кинематически предшествующих электрогруппе. Например, при двухскоростном электродвигателе и структурной формуле z = 24 = 2*3*2*2
и при φ = 1,12 (х3 = Е2 = 6) возможны только следующие варианты:
z=24=2[6]*3[1]*2[3]*2[12];
z= 24 = 2[6]*3[1]*2[12]*2[3];
z = 24 = 2[6]*3[2]*2[l]*2[12];
z = 24 = 2[6]*3 [2]*2 [12]*2 [1].
На рис. 48 показан график частот вращения привода с двухскоростным электродвигателем для варианта структурной формулы z = 24 = 2 [6]*3 [1]*2 [3]*2 [12]. Порядок построения
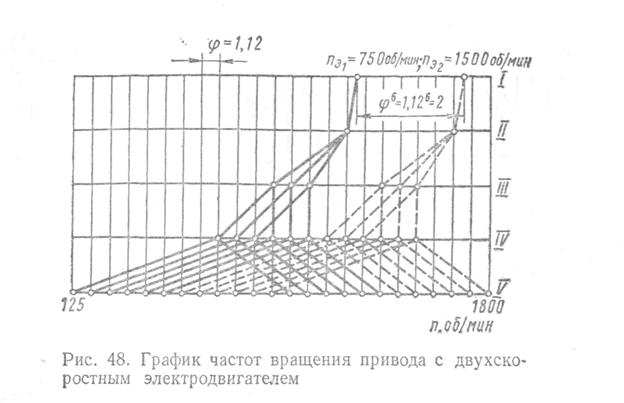
графика частот вращения такой же, как и при односкоростном электродвигателе.
Вопрос 34: Проектирование приводов главного движения с
использованием вариаторов.
Существует большое разнообразие конструкций и типов фрикционных вариаторов. Для
фрикционных рабочих поверхностей обычно используют конические тела или поверхности с
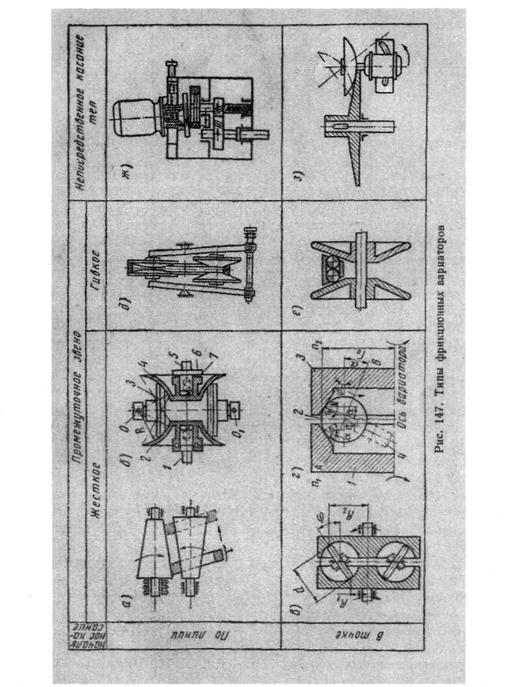
круговыми образующими. На рис. 147 показаны типовые схемы вариаторов. Наиболее
распространен метод передачи движения через промежуточное звено, что расширяет диапазон
регулирования. Промежуточное звено может быть жестким, выполненным в виде кольца,
ролика или шарика, или гибким в виде специального ремня или цепи.
|
|
|
Начальное касание контактирующих тел осуществляется по линии или в точке. В первом
случае возникают меньшие контактные напряжения, но создаются условия для относительного
кинематического скольжения. Величина скольжения сильно зависит от принятой схемы.
На рис. 147 все вариаторы разбиты на соответствующие шесть групп. В качестве примеров
приведены: вариатор с конусами и стальным промежуточным кольцом, которое перемещается
вдоль образующих а, вариатор системы ЦНИИТМАШа б, торовый вариатор с поворотными
роликами в, шариковый вариатор г, вариатор с двумя парами раздвижных конусов и специальным
ремнем д или с шариковой цепью е в качестве промежуточного звена; конусные вариаторы без
промежуточного звена ж, з.
Рассмотрим конструктивное оформление некоторых вариаторов.
Распространенной отечественной конструкцией является торовый вариатор системы
ЦНИИТМАШа (В. А. Светозарова), схема работы которого показана на рис. 147, б. Две чашки 2 и
4 имеют торовые поверхности, образованные вращением дуги радиусом R вокруг оси 1 и 5. Три
промежуточных ролика 3 имеют рабочий поясок, выполненный также по радиусу R для
обеспечения контакта по линии. При повороте роликов относительно осей 0 и Oi из меняются
радиусы, по которым происходит контакт роликов и чашек и, следовательно, изменяется
передаточное отношение вариатора.
Для передачи крутящего момента необходимо прижатие чашек и роликов. Начальное
прижатие осуществляется двумя пружинами, а для увеличения этой силы по мере роста крутящего
момента в данном вариаторе, как и в некоторых других типах, применяется специальное
шариковое прижимное устройство. Крутящий момент от вала к чашке передается через шарики 7
и шайбы 6, имеющие канавки со скосами. Одна шайба соединена с валом, другая — с чашкой. При
росте крутящего момента шарики перемещаются по скосам канавки и, раздвигая шайбы, создают
дополнительное прижатие чашек к роликам. Таким образом, автоматически создается
необходимое усилие прижатия, которое увеличивается с ростом передаваемого крутящего
момента.
|
|
|
Преимуществом вариатора системы ЦНИИТМАШа является малое относительное скольжение
на контактных поверхностях роликов и чашек, так как при любом положении роликов
касательная, проведенная к дуге в зоне контакта, проходит через точку пересечения осей вращения
ролика и чашки или в непосредственной близости от нее. Это условие соответствует совпадению
окружных скоростей чашек и роликов.
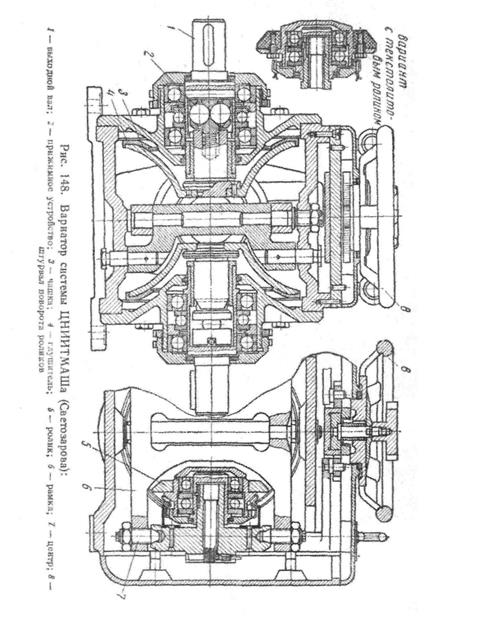
Конструктивное оформление такого вариатора показано на рис. 148. Для поворота роликов
предусматривается специальное устройство. ЦНИИТМАШ разработал нормальный ряд торовых
вариаторов с диапазоном регулирования Дот 3 (наиболее крупный типоразмер) до 6,25 и с
передаваемой мощностью от 1,7 до 20 кет. К. п. д. в зависимости от качества выполнения
передачи равен 0,92—0,98. Большое влияние на работоспособность вариатора оказывает качество
его изготовления и сборки, а также выбор материалов для фрикционных тел. Хорошие показатели
получаются при применении текстолитовых роликов и стальных закаленных чашек. Вариатор
этого типа можно применять для токарных, револьверных и других станков.
Применение вариаторов, у которых рабочие тела имеют начальный контакт в точке,
позволяет избежать относительного проскальзывания и во многих случаях может значительно
улучшить эксплуатационные характеристики вариаторов.
В качестве промежуточных тел применяют шарики, устанавливаемые в шариковом вариаторе
(см. рис. 147, г). Между ведущей 1 и ведомой 3 чашками с коническими рабочими поверхностями
помещены шарики 2 (обычно их 4 шт.), которые поддерживаются и прижимаются к чашкам
направляющими роликами 4 (их также 4 шт.). Передаточное отношение зависит от того, вокруг
какой оси вращается шарик. Так как точка касания шариков с чашками постоянна, то
передаточное отношение зависит от расстояния от точки касания до оси вращения
шарика.
|
|
|
Направление оси вращения шариков зависит от положения поддерживающих роликов.
Повертывая их, можно изменять величину передаточного отношения. Конструкция
шарикового вариатора показана на рис. 149. Направляющие ролики находятся в червячных
колесах с общим червяком. При повороте червяка изменяется положение оси роликов и,
следовательно, передаточное отношение вариатора. Управление вариатором производится
через валик червяка, проходящий через левый приводной вал. Шариковые вариаторы имеют
большой диапазон регулирования — до 20, но при больших значениях передаточных
отношений к. п. д. заметно падает. Передаваемая мощность обычно не превышает 3—4 кет.
Широкое применение получили вариаторы с двумя парами раздвижных конусов и п
промежуточным звеном, выполненным в виде специального ремня, стального кольца (см. рис. 60),
шариковой цепи или цепи с пластинками.

|
Расчёт вариаторов. В приводах станков иногда удобно применять вариаторы. При небольшом диапазоне регулирования частот вращения (чисел двойных ходов) и подач используют только вариаторы, если же требуемый диапазон больше диапазона бесступенчатого регулирования, то вариаторы комбинируют с шестеренными коробками (рис. 49, б) и в этом случае диапазон регулирования привода
Построение графика частот вращения при комбинации вариатора с коробкой скоростей аналогично ранее изложенному.
Особые структуры привода станка могут быть нескольких вариантов.
|
|
|
