 |


Естественные электромеханическая и механическая
|
|
|
|
Характеристики ДПТ ПВ
Электромеханическая и механическая характеристики ДПТ ПВ являются естественными, eсли  ,
,  и
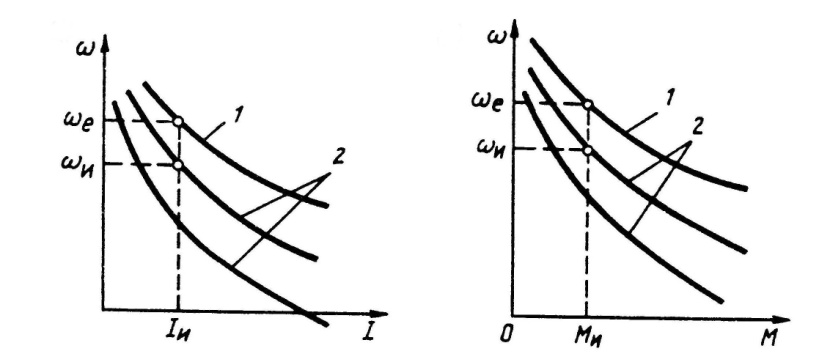
и  = 0. На практике для построения естественных характеристик используют обобщенные зависимости (универсальные характеристики) для двигателей данного типа (рис.3.4).Универсальная характеристика
= 0. На практике для построения естественных характеристик используют обобщенные зависимости (универсальные характеристики) для двигателей данного типа (рис.3.4).Универсальная характеристика
дается в относительных величинах:
 ;
;  ;
; 
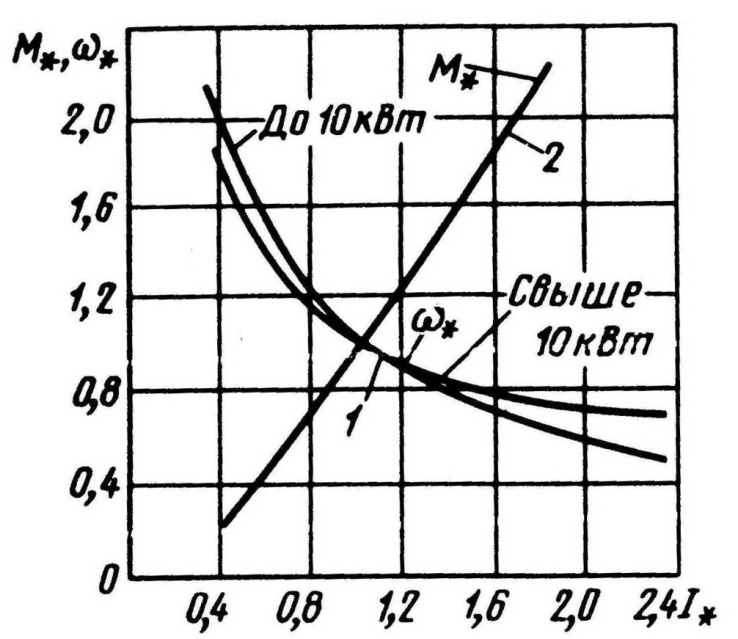
Рис. 3.4.Универсальные характеристики двигателей ДПТ ПВ.
где I, M и  - текущие значения тока, момента и угловой скорости двигателя;
- текущие значения тока, момента и угловой скорости двигателя;  ,
,  и
и  - номинальные значения тока,момента и
- номинальные значения тока,момента и
угловой скорости двигателя.
Для построения характеристик двигателя задаемся несколькими относительными значениями тока двигателя  на универсальной характеристике и по кривым
на универсальной характеристике и по кривым  и
и  определяем значения
определяем значения  и
и  [18]. Абсолютные значения тока, угловой скорости
[18]. Абсолютные значения тока, угловой скорости
и момента: 
При построении характеристик стремятся значения относительных величин выбирать по возможности равномерно. Результаты расчетов заносим в табл.3.1.
Затем задаемся значением  и определяем координаты второй точки. Результаты заносим в ту же таблицу. Таким образом, длязаданного диапазона изменения угловой скорости или тока получим
и определяем координаты второй точки. Результаты заносим в ту же таблицу. Таким образом, длязаданного диапазона изменения угловой скорости или тока получим
серию расчетных точек (не менее пяти).
Таблица 3.1
Данные для расчета электромеханической и механической
характеристик ДПТ ПВ
|
| 
| 
| 
| 
| 
|
3. З. Искусственные механические характеристики ДПТ ПВ
Механические характеристики ДПТ ПВ являются искусственными в следующих случаях:
в цепь якоря последовательно включают добавочный резистор;
изменяют напряжение питания машины;
параллельно якорю или обмотке возбуждения включают резистор.
На искусственных механических характеристиках двигатель работает при регулировании частоты вращения, ограничении пусковых токов и во многих других случаях, например, при снижении напряжения при пуске мощного двигателя. Искусственные механические
|
|
|
характеристики строят различными методами.
Аналитический метод построения искусственной характеристики при изменении добавочного сопротивления в якорной цепи.
Добавочное сопротивление в якорную цепь вводится для ограничения пускового тока или регулирования частоты вращения. Для любого значения частоты вращения и соответствующего тока I двигателя на естественной электромеханической характеристике уравнение ЭДС можно записать в виде
 . (3.6)
. (3.6)
где  - магнитный поток двигателя, соответствующий току
- магнитный поток двигателя, соответствующий току  .
.
При введении в цепь якоря добавочного сопротивления двигатель будет работать на искусственной характеристике. Тогда
 (3.7)
(3.7)
где  ,
,  ,
,  - магнитный поток, угловая скорость и ток
- магнитный поток, угловая скорость и ток
двигателя на искусственной характеристике.
Определим значения угловых скоростей  и из уравнений ( 3. 6) и (3.7) и возьмем их отношение:
и из уравнений ( 3. 6) и (3.7) и возьмем их отношение:
 (3.8)
(3.8)
а б
Рис.3.5. Электромеханические характеристики ДПТ ПВ при введении
добавочного резистора.
Если у двигателя на естественной и искусственной электромеханических характеристиках токи равны, т.е.  , то равны и
, то равны и
потоки в озбуждения:  (рис.3.5).
(рис.3.5).
Выражение (3.8) с учетом сказанного запишем следующим образом:
 (3.9)
(3.9)
откуда
 (3.10)
(3.10)
Таким образом, задаваясь на естественной электромеханической характеристике з начениями тока  и угловой скорости
и угловой скорости  , определяем угловую скорость
, определяем угловую скорость  на искусственной характеристике при введенном в цепь якоря добавочном сопротивлении для того же тока.
на искусственной характеристике при введенном в цепь якоря добавочном сопротивлении для того же тока.
Построение искусственных электромеханических и механических характеристик при введении в цепь якоря добавочного сопротивления выполняем следующим образом. По универсальной характеристике и паспортным данным двигателя строим естественные механическую и электромеханическую характеристики. Определяем значение
|
|
|
сопротивления резистора  :
:
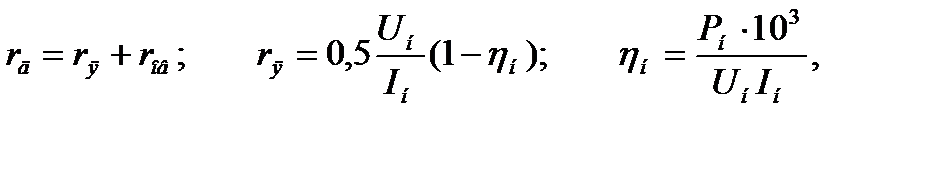 (3.11)
(3.11)
где  - сопротивление обмотки возбуждения; = 0,5
- сопротивление обмотки возбуждения; = 0,5  ;
;
 .
.
По выражению (3.10) строим искусственную электромеханическую характеристику для заданного сопротивления  . Для этого
. Для этого
задаемся током и определяем  (рис.3.6).
(рис.3.6).
 (3.12)
(3.12)
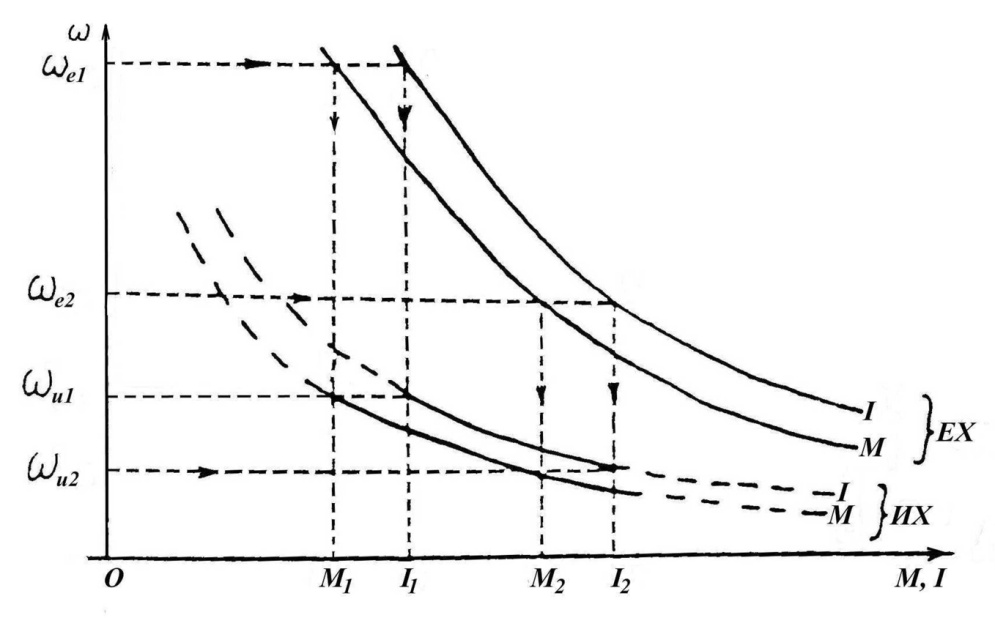
Рис. 3.6. Построение искусственных механических и
электромеханических характеристик ДПТ ПВ аналитическим
методом при включении добавочного сопротивления.
После этого принимаем значения тока:  (не менее пяти точек в рассматриваемом диапазоне) и рассчитываем соответствующие угловые скорости и т.д. По полученным данным строим
(не менее пяти точек в рассматриваемом диапазоне) и рассчитываем соответствующие угловые скорости и т.д. По полученным данным строим
искусственную электромеханическую характеристику.
Для построения искусственной механической характеристики поступают следующим образом: при угловой скорости  (токе ) значение момента двигателя равно
(токе ) значение момента двигателя равно  . На искусственной электромеханической характеристике при угловой скорости значение тока не изменилось, следовательно, не изменился и момент, т.е.
. На искусственной электромеханической характеристике при угловой скорости значение тока не изменилось, следовательно, не изменился и момент, т.е.  . Аналогично определяем моменты для
. Аналогично определяем моменты для  и т.д. Соединив полученные точки, получим искусственные механическую и электромеханическую характеристики (рис.3.6).
и т.д. Соединив полученные точки, получим искусственные механическую и электромеханическую характеристики (рис.3.6).
Графический метод построения искусственных механических характеристик двигателей последовательного возбуждения заключается в в следующем. Если ток двигателя последовательного возбуждения постоянен, т.е. I = const, то постоянным будет и поток возбуждения (Ф = соnst). Из уравнения ЭДС двигателя определяем зависимость
сопротивления якорной цепи от угловой скорости:
 (3.13)
(3.13)
откуда
 (3.14)
(3.14)
3начит, при одном и том же токе двигателя между угловой скоростью и сопротивлением существует линейная зависимость.
Для построения графика искусственной механической характеристики в требуемом диапазоне задаемся пятью-шестью значениями токов:  . Графики изменения сопротивления от угловой скорости
. Графики изменения сопротивления от угловой скорости
R = f( ) при заданных значениях токовстроим во втором квадранте по двум точкам. Для тока
) при заданных значениях токовстроим во втором квадранте по двум точкам. Для тока  координаты первой точки ( = 0;
координаты первой точки ( = 0; 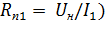 ; второй - (
; второй - ( ). Для тока
). Для тока  координаты следующие: первой точки (
координаты следующие: первой точки ( ; второй
; второй  и т.д. Таким образом, получаем семейство линейных характеристик R = f(
и т.д. Таким образом, получаем семейство линейных характеристик R = f(
Искусственную электромеханическую характеристику при заданном добавочном сопротивлении строят вследующем порядке (рис.3.7): от сопротивления  дополнительно по оси R откладываем в масштабе (точка б); через точку б проводим прямую, параллельную оси . Эта прямая пересекает графики
дополнительно по оси R откладываем в масштабе (точка б); через точку б проводим прямую, параллельную оси . Эта прямая пересекает графики  в пяти точках: 1”, 2”, 3, 4”, 5”. Эти точки определяют значения угловой скорости двигателя при введенном добавочном сопротивлении
в пяти точках: 1”, 2”, 3, 4”, 5”. Эти точки определяют значения угловой скорости двигателя при введенном добавочном сопротивлении  для токов
для токов  Для графического построения электромеханической характеристики = (I) проводим прямую, параллельную оси I ‚ через 1” до пересечения с точкой в точке , которая лежит на искомой электромеханической характеристике = f (t).
Для графического построения электромеханической характеристики = (I) проводим прямую, параллельную оси I ‚ через 1” до пересечения с точкой в точке , которая лежит на искомой электромеханической характеристике = f (t).
|
|
|
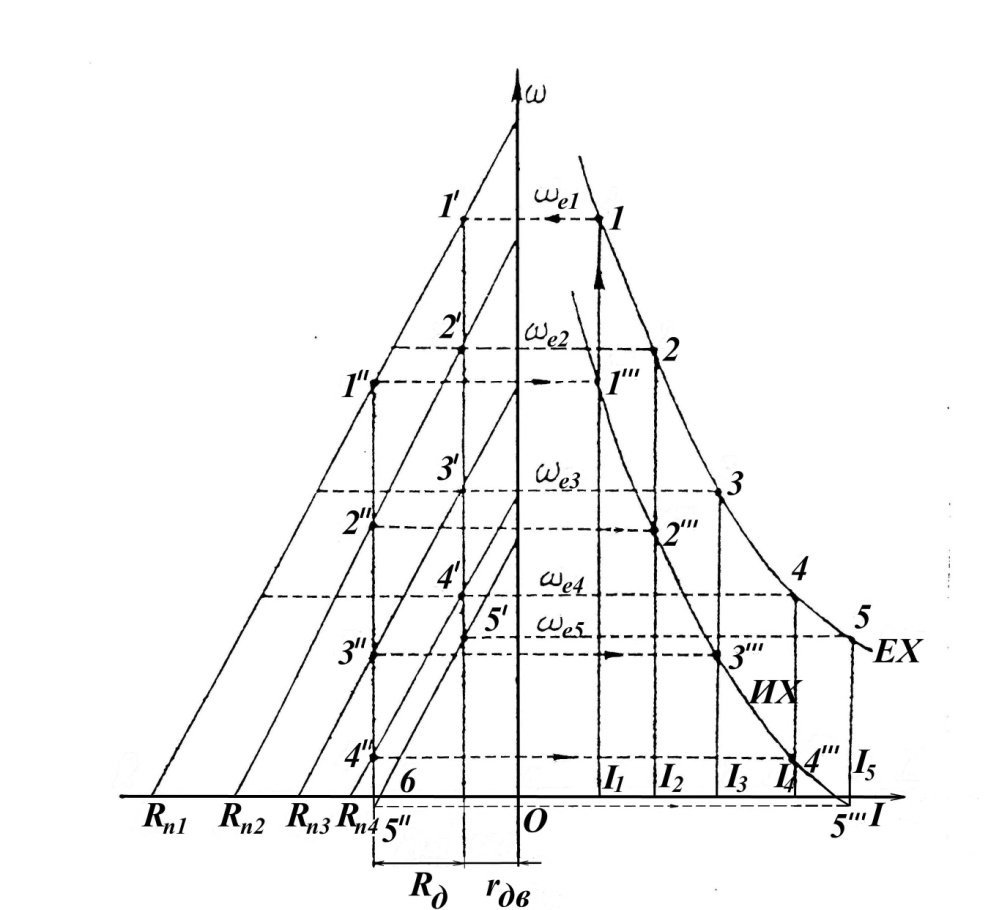
Рис. 3.7. Графический метод построения электромеханической характеристики ДПТ ПВ при изменении добавочного резистора.
Аналогичные построения выполняются для точек  т.д. Соединив эти точки плавной линией, получим график электромеханической характеристики при добавочном сопротивлении .
т.д. Соединив эти точки плавной линией, получим график электромеханической характеристики при добавочном сопротивлении .
Механическую характеристику строят так же, как при
аналитическом методе.
Искусственные механические характеристики двигателя последовательного возбуждения при изменениях напряжения отражают изменения момента и угловой скорости при регулировании частоты вращения двигателя и при ограничении пускового тока. Для этого используется специальный регулируемый источник: система Г-Д, управляемый тиристорный выпрямитель и т.д. Механические характеристики при изменениях напряжения можно построить по полученным ранее соотношениям. Уравнение ЭДС двигателя (3.7) при работе на искусственной характеристике для заданного тока I:
 . (3.15)
. (3.15)
В этом случае необходимо в уравнении (3.7) принять  и
и  . Тогда
. Тогда
 (3.16)
(3.16)
Для заданного значения  примем значения токов
примем значения токов  и определим угловые скорости
и определим угловые скорости  по выражению (3.16). Построим искусственную электромеханическую характеристику. Механическая характеристика строится аналогично.
по выражению (3.16). Построим искусственную электромеханическую характеристику. Механическая характеристика строится аналогично.
Тормозные режимы ДПТ ПВ
ДПТ ПВ может работать в двух тоpмозных режимах: противовключения и динанамического тоpможения.
В режиме противовключения ДПТПВ напряжение сети и ЭДС совпадают по знаку. Для ограничения значения тока в цепь якоря вводится добавочный резистор. Механические характеристики для этого режима располагаются во втором и четвертом квадрантах.
|
|
|
Режим противовключения возможен в двух случаях:
1.При работе двигателя с активным моментом сопротивления, например, движение лебедки, поднимающей груз. Здесь  – момент сопротивления, создаваемый грузом (рис.3.8).
– момент сопротивления, создаваемый грузом (рис.3.8).
Рис. 3.8. Характеристика режима противовключения ДПТ ПВ при включении добавочного резистора в цепь якоря.
Подъем груза идет со скоростью ω1 (точка 1). Включаем в цепь якоря добавочное сопротивление Rдобl , двигатель переходит на искусствeннyю механическую характеристику (точка 2). Под действием груза происходят тоpможение двигателя до ω3 = 0. В точке 3  , поэтомy под действием груза двигатель начинает вращаться в обратнyю сторону, против включения, и в точке 4
, поэтомy под действием груза двигатель начинает вращаться в обратнyю сторону, против включения, и в точке 4  . Двигатель будет работать с постоянной угловой скоростью ω4 в режиме противовключения, опуская груз.
. Двигатель будет работать с постоянной угловой скоростью ω4 в режиме противовключения, опуская груз.
Рис.3.9. Реверсирование двигателя ДПТ ПВ.
2.При реверсе двигателя, который осуществляют изменением полярности подведенного к якорю напряжения (рис.3.9). Направление тока в обмотке возбуждения не меняют, с тем чтобы не перемагнитить систему (рис. 3.10).
Механические характеристики для этого случая изображены на pис. 3.10.
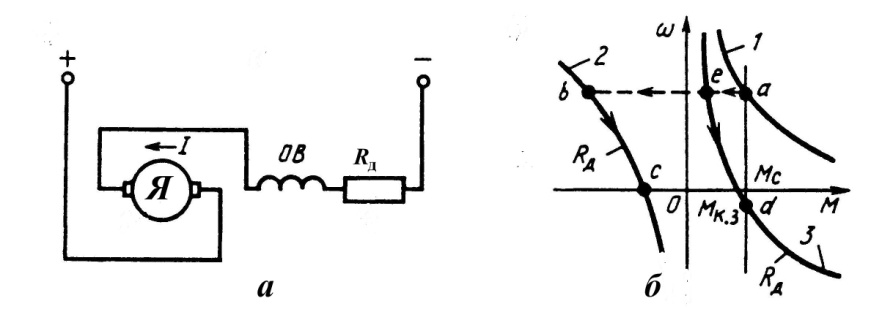
Рис.3.10. Механические характеристики ДПТ ПВ
при реверсе в режиме противовключения..
При переключении обмоток якоря под действием сил инерции угловая скорость в первый момент не изменится. Не меняются направление тока в обмотке возбуждения и знак потока возбуждения. Ток якоря меняет свое направление, поэтому момент двигателя становится отрицательным и характеристика располагается во втором квадранте. Этот момент тормозной, так как момент и угловая скорость имеют разные знаки. При реверсе ЭДС двигателя и напряжение сети совпадают по знаку, поэтому для ограничения тока в цепь якоря включают добавочный резистор, и характеристика получается пологой. В режим противовключения характеристика двигателя располагается
между точками б и с.
Уравнение ЭДС для режима противовключения:
 (3.17)
(3.17)
Умножим на ток I левую и правую части:
 (3.18)
(3.18)
Из этого выражения следует, что энергия, подводимая из сети и с вала двигателя, полностью теряется в резисторах  и
и  .
.
Динамическое торможение ДПТ ПВ можно осуществить двумя способами: с независимым возбуждением и с самовозбуждением.
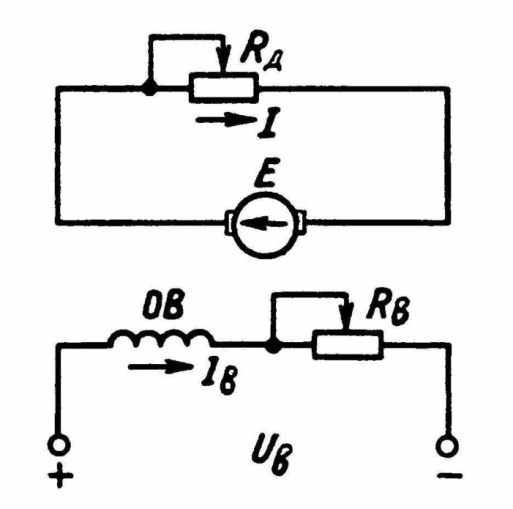
Торможение с независимым возбуждением получают следующим образом: обмотку якоря замыкают на добавочный резистор, а обмотку возбуждения включают в сеть. В этом случае имеем рассмотренное ранее динамическое торможение двигателя независимого (параллельного) возбуждения. Схема и механические характеристики для этого случая приведены на рис.3.11.
|
|
|
а б
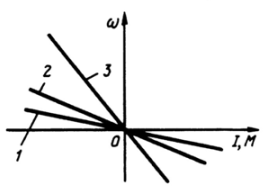
Рис.3.11. Механические характеристики ДПТ ПВ в режиме
динамического торможения с независимым возбуждением: а - схема;
б – механические характеристики.
В режиме динамического торможения с самовозбуждением якорь включают последовательно с обмоткой возбуждения через добавочный резистор. Чтобы не размагничивать систему при данном способе торможения, переключают якорь и оставляют прежним направление тока в обмотке возбуждения (рис.3.12).
Остаточный магнитный поток машины в обмотке якоря наводит ЭДС. После переключения якоря направление тока обмотки возбуждения остается прежним, и остаточный поток сyммиpуется с потоком, созданным током возбуждения. Значение наведенной ЭДС возрастает, одновременно растет и ток. Для его ограничения необходимо добавочное сопротивление Rдоб, Знак создаваемого момента будет отрицательным из-за смены направления тока в якоре, следовательно, для рассматриваемого направления вращения имеем тоpмозной режим. Механическая характеристика в режиме динамического торможения будет нелинейной, как и для двигательного режима (рис.3.13)
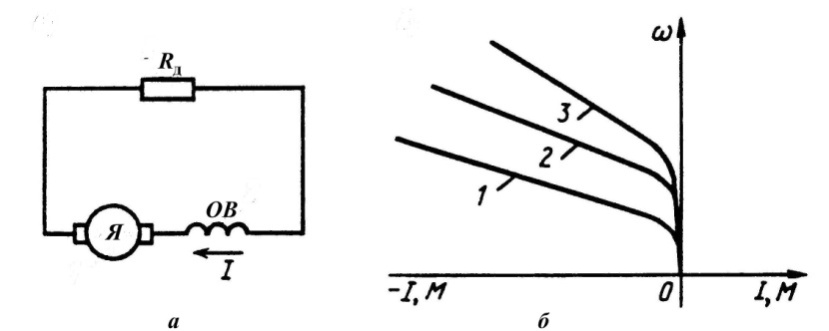
Рис.3.13. Механические характеристики ДПТ ПВ в режиме
динамического торможения с самовозбуждением.
Как показывает Москаленко, В.В. [12], особые свойства приобретает электродвигатель последовательного возбуждения при шунтировании обмотки якоря резистором  (рис.3.14). Ток в обмотке
(рис.3.14). Ток в обмотке
возбуждения
 ,
,
где  - ток якоря, А;
- ток якоря, А;  ток в шунтирующем резисторе, А.
ток в шунтирующем резисторе, А.
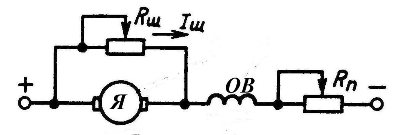
Рис.3.14. Схема включения ДПТ ПВ при шунтировании якоря
добавочным резистором.
В целях упрощения рассуждений можно принять, что в электродвигателе действует два магнитных потока: поток  , созданный током якоря, зависящий от нагрузки электродвигателя, и поток
, созданный током якоря, зависящий от нагрузки электродвигателя, и поток  , созданный током
, созданный током  , не зависящий от нагрузки электродвигателя.
, не зависящий от нагрузки электродвигателя.
Наличие магнитного потока делает возможным в электродвигателе последовательного возбуждения режим холостого хода. Значение частоты вращения идеального х.х.  в таком электродвигателе тем меньше, чем меньше значение сопротивления резистора
в таком электродвигателе тем меньше, чем меньше значение сопротивления резистора  .
.
Электродвигатель последовательного возбуждения с шунтирующим резистором может работать в режиме генераторного торможения с отдачей энергии в сеть постоянного тока. Характеристики для этого режима работы представлены на рис. 3.16.
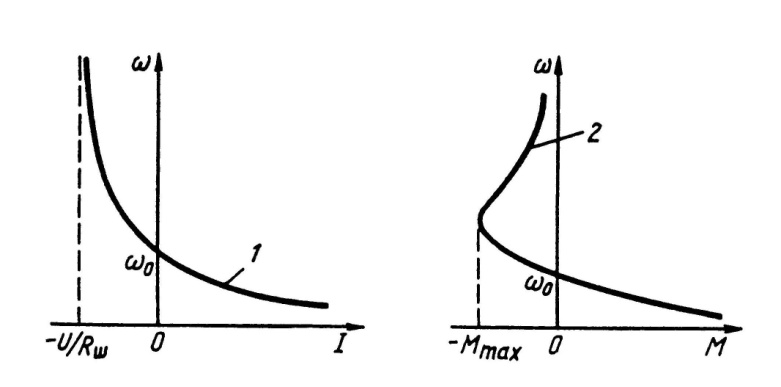
а б
Рис.3.15. Электромеханическая – а и механическая - б характери стики ДПТ ПВ при шунтировании якоря добавочным резистором.
|
|
|
