 |


Датчики истинной воздушной скорости.
|
|
|
|
Они служат для получения сигналов в виде напряжения, пропорционального истинной воздушной скорости. Такие сигналы необходимы для работы многих автоматических и полуавтоматических систем. К ним следует отнести навигационные индикаторы, навигационные вычислители, системы управления и др.
Приборы для измерения вертикальной скорости
Для измерения вертикальной скорости самолета наиболее широкое применение получили вариометры. Принцип действия вариометра основан на пневмомеханическом дифференцировании статического давления, изменяющегося в зависимости от высоты полета самолета.

Спуск
В качестве чувствительного элемента используется манометрическая коробка внутренняя полость которой сообщается непосредственно с магистралью статического давления через капилляр 5.
Если самолет летит горизонтально, то статическое атмосферное давление р внутри манометрической коробки 7 и давление p1 внутри корпуса прибора будут одинаковы и, следовательно, разность между ними равна нулю.
В зависимости от высоты полета изменяется статическое давление р. Внутри манометрической коробки это давление устанавливается практически мгновенно, а в корпусе прибора, вследствие сопротивления капилляра, давление р1 отличается от статического. Чем больше вертикальная скорость полета самолета, тем больше разность давлений Δр = р - р1. Под действием этой разности давлений манометрическая коробка деформируется. Деформация коробки через тягу 6, зубчатый сектор 4 и трибку 3 передается на стрелку 2, которая отклоняется от среднего положения вверх при наборе высоты, вниз — при снижении. По шкале 1 определяют величину вертикальной скорости.
|
|
|

Курсовые приборы и системы
Курс самолета является одним из важнейших навигационных параметров. Он измеряется в плоскости земли по часовой стрелке от заранее определенной линии отсчета к проекции продольной оси самолета. На практике в качестве линий отсчета используются направления географического или магнитного меридианов и ортодромии.

Локсодромия
Ортодромия
Если курс самолета измеряется относительно географического меридиана, он называется истинным (ИК). Поскольку географический и магнитный полюсы, а следовательно, и их меридианы не совпадают, магнитный курс (МК) отличается от истинного на величины углов ΔM магнитного склонения.
При полетах по локсодромии — все земные меридианы пересекаются под одним и тем же углом ψ, что используется для прокладки маршрута при пролетах по магнитному компасу.
Ортодромия, представляющая собой линию кратчайшего расстояния между двумя точками на поверхности Земного шара, используется при выборе маршрута полета на большие расстояния, что позволяет значительно сократить расход горючего в полете.
Курс самолета измеряется приборами и системами, принцип действия которых основан на разнообразных физических и астрономических закономерностях.
В зависимости от принципа, положенного в основу работы датчиков, курсовые приборы и системы подразделяются на магнитные, индукционные, астрономические и радиотехнические.
Магнитные компасы.
Магнитным компасом называется устройством помощью которого определяется направление магнитного меридиана.
Магнитный компас, можно считать одним из первых навигационных приборов, применявшихся человеком. Имеются сведения, что еще за 2,5 тысячи лет до н. э.
Китайцам было известно свойство свободно подвешенного магнита указывать на Север.
Задачи, которые приходится решать экипажам воздушных судов, подразделяются на две группы:
|
|
|
1) обеспечение стабилизации воздушного судна относительно центра масс — пилотирование;
2) вождение воздушного судна по заданной траектории из одной точки пространства в другую — навигация.
Величины, характеризующие пространственное место воздушного судна и вектор его скорости в данный момент, называются навигационными элементами полета.
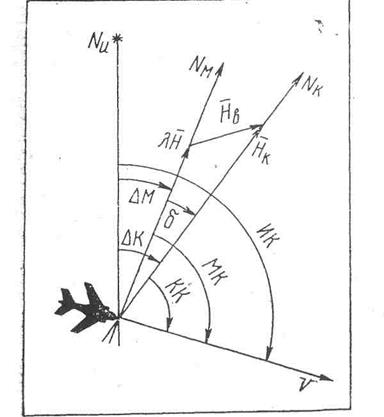
Курс воздушного судна — один из навигационных элементов полета. Под курсом воздушного судна в воздушной навигации понимают угол между положительным направлением меридиана и продольной осью воздушного судна, отсчитываемый по часовой стрелке.
В воздушной навигации курсы различают:
1. Магнитный курс (МК) - угол между северным направлением земного магнитного меридиана и продольной осью воздушного судна.
2. Истинный курс (ИК) - угол между направлением географического меридиана и продольной осью воздушного судна.
3. Условный курс - угол между направлением условного меридиана, т. е. любого заданного заранее направления на земной поверхности, и продольной осью воздушного судна.
Принцип действия магнитных компасов основан на свойстве свободно подвешенного магнита устанавливаться своей осью вдоль вектора результирующего магнитного поля Земли, т. е. вдоль магнитного меридиана. И тогда измеренный курс носит наименование магнитного (МК).
Однако на установленный в самолете компас, помимо магнитного поля Земли оказывает воздействие собственное магнитное поле самолета, возникающее в связи с наличием ферромагнитных материалов в его конструкции и магнитных полей при работе установленного оборудования. Под воздействием этих полей ось магнитной стрелки устанавливается вдоль их результирующего вектора, который называется компасным меридианом. Отсчитываемый в этом случае курс называется компасным (КК), а несовпадение магнитного и компасного меридиана определяется углом магнитной девиации ΔК.
В полете экипаж по показаниям компаса определяет компасный курс КК, а затем по величинам магнитного склонения ΔМ и девиации ΔК вычисляет истинный курс.
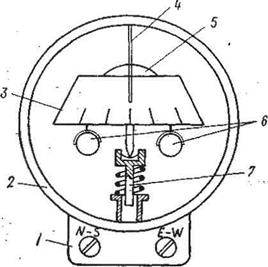
Кинематическая схема магнитного компаса:
1—девиационный прибор; 2—корпус;
|
|
|
3—картушка; 4—индекс; 5—поплавок;
6—магниты; 7—подпятник.
В настоящее время наиболее широко применяется магнитный компас типа КИ-13.
Магнитные компасы являются не основными навигационными приборами, они используются в авиации в качестве резервных курсовых приборов.
Современный магнитный компас — это устройство, не требующее никакого электрического питания, имеет весьма небольшие размеры, масса не превышает 200 г.
Компасный курс отсчитывается по картушке против индекса.
Компасный курс с поправкой на девиацию является магнитным, а с поправкой на магнитное склонение истинным курсом.

Индукционные дистанционные компасы. Применяемые на современных самолетах дистанционные компасы чаще всего имеют электрические индукционные элементы, которые в виде датчика устанавливаются в тех местах, где собственное магнитное поле самолета минимально. Обычно для этого используется хвостовая часть фюзеляжа, крыло или стабилизатор.

Схема индукционного датчика ИД:
а — магнитный зонд; б — датчик
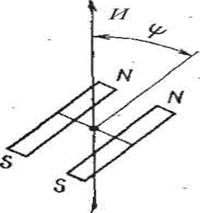
Чувствительным элементом индукционного датчика служит магнитный зонд. Он представляет собой два соосных пермаллоевых сердечника, на каждый из которых намотаны намагничивающие обмотки w1, а на весь зонд — сигнальная обмотка w2.
При подключении намагничивающих обмоток к источнику переменного тока U1 изменяется магнитная проницаемость сердечников. Поскольку эти обмотки навиты встречно, возникающие магнитные потоки Ф1 противоположны и равны по абсолютной величине. Поэтому суммарный магнитный поток Ф2 в каждый момент времени равен нулю, и ЭДС в сигнальной обмотке отсутствует.
Однако в результате того, что зонд находится в магнитное поле Земли с напряженностью горизонтальной составляющей Н3 в сердечниках возникает магнитный поток
Ф2 = μSHзСОSΨ
Где μ, S — магнитная проницаемость и площадь сечения сердечников; Ψ — угол между вектором Н3 и осью зонда.
Под действием этого потока в сигнальной обмотке станет индуцироваться переменная ЭДС. Если ось зонда совпадает с магнитным меридианом, ее значение будет максимальным; если же ось перпендикулярна к меридиану—ЭДС равна нулю. Таким образом, представляется возможность измерения магнитного курса.
|
|
|
Для того чтобы исключить влияние величины Н3 на значение измеряемого курса при полетах в разных широтах, в индукционных датчиках типа ИД три зонда. Они монтируются на пластмассовой платформе в виде равностороннего треугольника. Эта платформа подвешена на кардановом подвесе, который обеспечивает ее горизонтальное положение при кренах до 17°. Сигнальные обмотки соединены треугольником. Выводы с них подсоединены к клеммам штепсельного разъема.
Индукционные датчики чаще всего применяются не как самостоятельные курсовые приборы, а как элементы в системах коррекции современных курсовых систем типа ГМК, КС и др.
Понятие компасных направлений справедливо не только для компасов магнитно-индукционной группы, но и для компасов других типов — гироскопических и астрономических. И в этих случаях связь ИК и КК определяется формулой, но только природа поправки компаса ΔК здесь иная. Для этих компасов ΔК представляет сумму остаточных (не скомпепсированных) и накопившихся инструментальных и методических погрешностей, взятых с обратным знаком. Поправка компаса во всех случаях определяется как разность ИК и КК, т. е. ΔК = ИК - КК.
Понятие о гироскопе
Всем известны замечательные свойства быстро вращающегося волчка.
Неподвижный волчок под действием собственной силы веса неизменно падает на бок. Быстро вращающийся волчок спокойно балансирует на кончике своей оси. Устойчивость, сообщаемая волчку быстрым вращением, уже давно привлекла внимание исследователей.
Первым серьезным использованием замечательных свойств волчка был опыт, поставленный физиком Л. Фуко в 1852г. Л.Фуко демонстрировал построенный, им прибор «гироскоп», основной частью которого был быстро вращающийся ротор (маховик).
Прибор Фуко впервые позволил обнаружить суточное вращение Земли непосредственным лабораторным наблюдением. Термин «гигроскоп» получен от греческих слов «гирос»— вращение и «скопео» — наблюдаю.
При поворотах оси вращения ротора гироскопа в пространстве возникает гироскопический момент.
Быстро вращающимся симметричным гироскопом называют вращающееся вокруг оси симметрии с большой угловой скоростью тело вращения (ротор). Ось z симметрии ротора 1 называют осью фигуры или осью ротора гироскопа.
В большинстве гироскопических приборов для обеспечения свободы вращения ротора гироскопа вокруг неподвижной точки О применяют карданов подвес, который состоит из двух рамок 2 и 3.
|
|
|
Карданов подвес обеспечивает ротору гироскопа свободу вращения относительно трех осей (z, x и у1). Поэтому гироскоп, установленный в кардановом подвесе, называют гироскопом с тремя степенями свободы. Если центр масс гироскопа совпадает с точкой пересечения осей карданова подвеса, то такой гироскоп называется астатическим.
|
|
|
