 |


Основные понятия и определения
|
|
|
|
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ
ОБЩЕОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«КОВРОВСКАЯ ГОСУДАРСТВЕННАЯ ТЕХНОЛОГИЧЕСКАЯ АКАДЕМИЯ
ИМ. В. А. ДЕГТЯРЁВА»
Ковров 2014
СОДЕРЖАНИЕ
КИНЕМАТИКА …………………………………………………………… 5
1. Введение в кинематику. Основные понятия и определения …………. 5
2. Способы задания движения материальной точки …………………….. 5
3. Определение вектора скорости материальной точки ………………… 7
4. Определение вектора ускорения материальной точки ……………….. 8
5. Определение значений скорости и ускорения
при естественном задании движения материальной точки.
Касательное и нормальное ускорения ………………………………..... 8
6. Поступательное движение твёрдого тела. Общее определение
и закон этого движения …………………………………………………. 9
7. Вращательное движение твёрдого тела вокруг неподвижной
оси. Общее определение характеристик и закона этого движения … 10
8. Определение закона равномерного вращательного движения ……... 11
9. Определение закона равнопеременного вращательного движения... 11
10. Выражение линейной скорости и линейных ускорений твёрдого
тела через характеристики вращения ………………………………… 12
11. Плоскопараллельное движение твёрдого тела. Общее
определение. Примеры ………………………………………………... 12
12. Определение вектора линейной скорости некоторой точки
твёрдого тела при плоскопараллельном движении ………………… 13
13. Теорема о проекциях на одну ось скоростей двух точек
твёрдого тела при плоскопараллельном движении …………………. 13
14. Определение вектора линейного ускорения некоторой точки
|
|
|
твёрдого тела при плоскопараллельном движении ………………… 14
15. Мгновенный центр скоростей (МЦС) плоской фигуры.
Общее определение ……………………………………………………. 14
16. Определение положения мгновенного центра ускорений
(МЦУ) плоской фигуры относительно мгновенного центра
скоростей этой фигуры ………………………………………………... 16
17. Определение ускорений любых точек плоской фигуры
относительно мгновенного центра ускорений этой фигуры ………... 18
18. Сложное (составное) движение материальной точки.
Теорема о сложении скоростей ……………………………………….. 18
19. Сложное (составное) движение материальной точки.
Теорема о сложении ускорений (теорема Кориолиса) ……………… 19
20. Оценка значения ускорения Кориолиса при полёте
самолёта в северном полушарии Земли ……………………………… 21
СТАТИКА ………………………………………………………………….. 23
1. Введение в статику. Основные понятия и определения …………….. 23
2. Аксиомы статики ………………………………………………………. 23
3. Виды связей. Силы реакций связей …………………………………... 24
4. Сложение сходящихся сил ……………………………………………. 26
5. Разложение пространственной силы на проекции по осям
координат ………………………………………………………………. 27
6. Разложение плоской силы по связям …………………………………. 28
7. Условия равновесия системы сходящихся сил ……………………… 30
8. Теория моментов сил ………………………………………………….. 30
9. Аналитические формулы для моментов относительно
координатных осей от проекций силы ……………………………….. 31
10. Теория пар сил. Основные понятия. Формулировки теорем ……….. 32
11. Теорема о параллельном переносе силы
(приведение силы к некоторому заданному центру) ………………... 32
12. Приведение произвольной (плоской или пространственной)
системы сил к некоторому заданному центру ……………………….. 33
13. Приведение пространственной системы сил к простейшему
|
|
|
виду в случае, когда главный вектор равен нолю, а главный
момент не равен нолю …………………………………………………. 33
14. Приведение пространственной системы сил к простейшему
виду в случае, когда главный вектор не равен нолю, а главный
момент равен нолю …………………………………………………….. 34
15. Приведение пространственной системы сил к простейшему
виду в случае, когда главный вектор и главный момент не
равны нолю и вектор главного момента перпендикулярен
главному вектору ………………………………………………………. 34
16. Приведение пространственной системы сил к простейшему
виду в случае, когда вектор главного момента параллелен
главному вектору ………………………………………………………. 35
17. Приведение пространственной системы сил к простейшему
виду в случае, когда вектор главного момента и главный
вектор не перпендикулярны и не параллельны ……………………… 35
18. Условия равновесия произвольной (пространственной или
плоской) системы сил …………………………………………………. 36
19. Теорема Вариньона …………………………………………………..... 36
20. Сложение параллельных сил. Центр двух параллельных сил ……… 37
21. Координаты центра сил, параллельных одной оси ………………….. 38
22. Координаты центра тяжести тел ……………………………………… 39
ДИНАМИКА ………………………………………………………………. 40
1. Введение в динамику материальной точки.
Основные понятия и определения ……………………………………. 40
2. Законы динамики материальной точки ………………………………. 40
3. Две задачи динамики материальной точки …………………………... 40
4. Случаи движения материальной точки ………………………………. 40
5. Понятия момента инерции тела и радиуса инерции тела …………… 42
6. Понятие количества движения материальной точки или
механической системы (МС) ………………………………………….. 44
7. Понятие момента количества движения материальной точки ……… 45
8. Понятие главного момента количества движения
механической системы (кинетического момента) …………………... 45
9. Теорема об изменении момента количества движения
материальной точки …………………………………………………... 46
10. Теорема об изменении кинетического момента механической
системы …………………………………………………………………. 47
|
|
|
11. Закон сохранения кинетического момента механической
системы относительно оси. Условия выполнения этого закона ……. 47
12. Понятие кинетической энергии материальной точки ……………….. 48
13.Понятие кинетической энергии механической системы ……………. 49
14. Теорема об изменении кинетической энергии механической
системы относительно оси. Условия выполнения этого закона ……. 50
КИНЕМАТИКА
ВВЕДЕНИЕ В КИНЕМАТИКУ.
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Кинематика (от греческого kinematos – движение) – это один из разделов теоретической механики (ТМ) (ещё есть статика – общее учение о силах, формулировка условий равновесия абсолютно твёрдых тел и динамика – описание движения тел под действием сил с учётом инертности масс тел).
В кинематике изучаются геометрические свойства движения тел без учёта их инерционности и действующих на них сил.
Системы отсчёта (СО):
основная СО – относительно её определяется движение других СО.
Это обычно неподвижная СО, связанная с Землёй;
подвижная СО – связана с телом;
инерциальная СО – неподвижная или движущаяся без ускорения;
неинерциальная СО – движущаяся с ускорением;
правая СО – её оси направлены так, что, глядя с конца каждой, переход от одной к другой – против хода часовой стрелки (рис. 1).
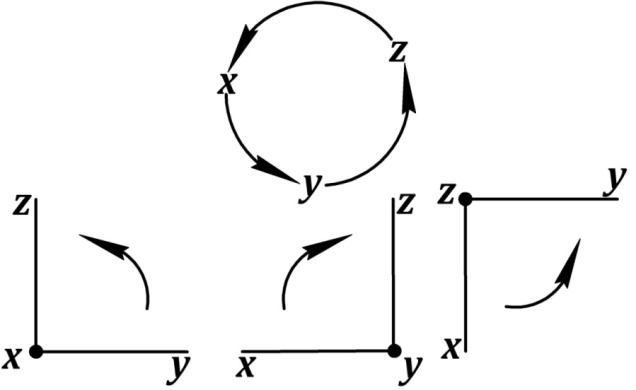
Рис. 1. Правая система отсчёта
Кинематические характеристики движения:
¾ координаты;
¾ скорости;
¾ ускорения.
|
|
|
