 |


Министерство образования и науки
|
|
|
|
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ
РОССИЙСКОЙ ФЕДЕРАЦИИ
____________________________________________
МОСКОВСКИЙ ЭНЕРГЕТИЧЕСКИЙ ИНСТИТУТ
(ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ)
______________________________________________
Т. В. Ягодкина, С. А. Хризолитова, В. М. Беседин,
Бондин О. А., Е. Н. Грачев
ИССЛЕДОВАНИЕ САУ С ИСПОЛЬЗОВАНИЕМ
ПРИКЛАДНОГО ПАКЕТА MATLAB
Лабораторный практикум
по курсу
«Основы автоматического управления»
Москва Издательство МЭИ 2007
УДК
621. 398
Л 125
УДК: 681. 51(076. 5)
Утверждено учебным управлением МЭИ
Подготовлено на кафедре управления и информатики
Исследование САУ с использованием прикладного пакета MATLAB.
Лабораторный практикум по курсу “Основы автоматического управления” -
Т. В. Ягодкина, С. А. Хризолитова, В. М. Беседин, Бондин О. А., Е. Н. Грачев. - М.: Изд-во МЭИ, 2006. - 88 с.
Содержит описания шести работ, посвященных изучению методов анализа и синтеза динамических систем автоматического управления. В работах исследуются как линейные системы (непрерывные и дискретные), так и нелинейные системы. Исследования проводятся с использованием прикладного пакета MATLAB.
Предназначен для студентов институтов: автоматики и вычислительной техники (АВТИ), электротехники (ИЭТ), радиотехники и электроники (ИРЭ).
 С Московский энергетический институт, 2006 г.
С Московский энергетический институт, 2006 г.
ЛАБОРАТОРНАЯ РАБОТА № 1
Изучение программного комплекса по моделированию и исследованию динамических систем «SIMULINK».
Исследование типовых динамических звеньев
Цель работы: изучение возможностей и назначения системы «SIMULINK» на примере исследования временных и частотных характеристик типовых динамических звеньев.
|
|
|
Описание программного комплекса «SIMULINK»
Система Simulink является расширением системы инженерных и научных расчетов MATLAB и позволяет решать задачи сокращения сроков проектирования, повышения качества разработки моделей физических систем и моделирования процессов в этих системах. Развитие этих подходов дает возможность улучшить документирование работ и использовать средства анимации.
Начало работы

Рис. 1. 1. Запуск системы Simulink
Система Simulink запускается из системы MATLAB путём; выбора указателем мыши пиктограммы Simulink (8-я слева) на панели инструментов системы MATLAB (рис. 1. 1). Можно также ввести команду simulink в командной строке системы MATLAB. В результате появляется окно Simulink Library Browser (Браузер главной библиотеки Simulink) системы Simulink, которое показано на рис. 1. 2. Открытие нового окна модели осуществляется нажатием левой кнопки мыши на пиктограмме Create a new model (1-я слева) панели инструментов данного окна. Имя окна (имя модели) задается по умолчанию - untitled (рис. 1. 3). В этом окне строится модель системы в виде структурной схемы.

Рис. 1. 2. Окно Simulink Library Browser

Рис. 1. 3. Окно модели
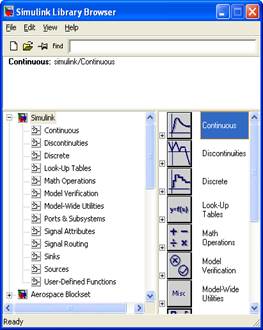 При двойном нажатии левой клавиши мыши на пиктограммах в левой части окна Simulink Library Browser или при однократном нажатии на значок «+» появляется список библиотек блоков, как показано на рисунке.
При двойном нажатии левой клавиши мыши на пиктограммах в левой части окна Simulink Library Browser или при однократном нажатии на значок «+» появляется список библиотек блоков, как показано на рисунке.
 В случае нажатия левой кнопки мыши на строке с наименованием библиотеки блоков, в правой части окна появляется список блоков указанной библиотеки.
В случае нажатия левой кнопки мыши на строке с наименованием библиотеки блоков, в правой части окна появляется список блоков указанной библиотеки.
Построение модели
Модели элементов структурных схем
В системе Simulink принято группировать модели объектов и устройств по функциональному уровню: источники сигналов, моделируемые системы и регистрирующие устройства. Рис. 1. 4 показывает основной характер физических и информационных процессов на данном уровне. Определенный элемент, физическая система описываются моделями, представляемыми в виде структурных схем системы Simulink, которые можно использовать для моделирования. Выходной сигнал источника является переменной, которая воздействует на систему, описываемую в виде структурной схемы. Значение этой переменной определяется некоторым правилом: функцией (показательной, тригонометрической, многочленом, в том числе константой и т. д. ), единичной ступенчатой функцией или функцией, задаваемой пользователем с использованием системы MATLAB. Модели источников сигналов — блоки, которые сгруппированы в библиотеки блоков Sources (Источники сигналов). Блоки, являющиеся моделями устройств для измерения переменных,
|
|
|

Рис. 1. 4. Элементы модели Simulink
размещены в библиотеке блоков Sinks (Средства регистрации). Совокупность данных фиксируется в виде графиков, диаграмм на экране дисплея и сохраняется в файле.
Модели системы Simulink могут включать один или несколько блоков из перечисленных выше групп. Например, можно описать модель автономной системы, которая не находится в состоянии равновесия. На структурной схеме такая система не имеет входного воздействия, однако модель включает блоки Integrator, блок Gain и блоки из библиотеки Sinks. Возможно также построение модели, которая состоит только из блоков библиотек Sources и Sinks. Если необходимо сформировать сигнал в виде суммы переменных, то одним из способов найти значение данного алгебраического выражения является использование блоков из библиотеки Sources системы Simulink и размещение переменных в рабочей области системы MATLAB или сохранение рабочей области в файле.
|
|
|
