 |


Открытие модели. Построение структурной схемы. Библиотека блоков системы Simulink
|
|
|
|
Открытие модели
Для открытия нового окна модели выбирается пиктограмма Create a new model на панели инструментов окна Simulink Library Browser, или используется команда Model меню второго уровня New меню File, а также можно применить комбинацию клавиш Ctrl+N.
Файлы системы MATLAB и системы Simulink записываются в каталоги и папки файловой системы. Каталогом, заданным по умолчанию, является начальный текущий каталог системы MATLAB. В системе обеспечивается возможность выбора каталогов с помощью команд меню File окна модели системы Simulink, однако, текущий каталог при этом не изменяется в течение всего сеанса работы. Если необходимо открыть файл какой-либо модели в том же каталоге, где уже был открыт файл модели, а данный файл отсутствует в списке файлов текущего каталога, необходимо найти соответствующий каталог и вызвать файл. Иногда целесообразно изменить текущий каталог, содержащий файл модели во время сеанса работы системы MATLAB (используя команду cd < новый каталог> ) и затем открыть модель средствами системы Simulink.
Рекомендуется задать каталог для файлов моделей системы Simulink, отделив его от каталогов и папок системы MATLAB, и устанавливать пути доступа к сохраняемым файлам. Данный подход обеспечит сохранение данных и возможность оперативного доступа.
Для поиска файлов существующей модели также используется способ непосредственного задания имени файла модели в командной строке системы MATLAB. При этом система MATLAB осуществляет следующие действия: поиск файла модели в текущем каталоге, а затем поиск файла с данным именем во всех каталогах списка путей доступа.
Построение структурной схемы
|
|
|
 Для построения структурной схемы модели необходимо подвести указатель мыши к нужному блоку в окне Simulink Library Browser и удерживая левую кнопку мыши, перетащить этот блок в окно модели. Далее такую же операцию нужно проделать для остальных компонентов схемы.
Для построения структурной схемы модели необходимо подвести указатель мыши к нужному блоку в окне Simulink Library Browser и удерживая левую кнопку мыши, перетащить этот блок в окно модели. Далее такую же операцию нужно проделать для остальных компонентов схемы.
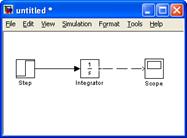 Затем следует провести линии связи, для этого указатель мыши помещается на выходной порт блока, который обозначается угловой скобкой «> » на правой стороне изображения блока. При этом указатель примет вид креста. Далее, при нажатой левой кнопке мыши, указатель мыши перемещается ко входному порту другого блока, он обозначается угловой скобкой «> », расположенной на левой стороне изображения блока. В случае верно выбранной точки входа указатель принимает вид двойного креста.
Затем следует провести линии связи, для этого указатель мыши помещается на выходной порт блока, который обозначается угловой скобкой «> » на правой стороне изображения блока. При этом указатель примет вид креста. Далее, при нажатой левой кнопке мыши, указатель мыши перемещается ко входному порту другого блока, он обозначается угловой скобкой «> », расположенной на левой стороне изображения блока. В случае верно выбранной точки входа указатель принимает вид двойного креста.
Для удобства пользователя в Simulink предусмотрена возможность редактирования изображений блоков: изменение размеров, вращение (с помощью команды Rotate меню Format), изменения направления передачи блока (команда Flip Block), копирование, операции с именем блока и др.; линий связи и их обозначений: перемещение отрезка линии связи, перемещение точки излома линии связи, задание излома на линии связи (с помощью клавиши Shift), ответвление линии связи (с помощью правой кнопки мыши), обозначение линии связи и др.
Библиотека блоков системы Simulink
В системе Simulink по умолчанию установлен способ доступа к блокам с помощью окна Simulink Library Browser (Браузер главной библиотеки Simulink). Браузер главной библиотеки вызывается выбором команды Show Library Browser меню View окна модели. На рис 1. 5 показана главная библиотека блоков Simulink.
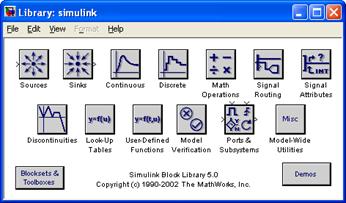
Рис. 1. 5. Библиотека блоков Simulink
Блоки из библиотеки Sources (Источники сигналов)
Блоки из библиотеки блоков Sources (Источники сигналов) не содержат входных портов и имеют один выходной порт. Описание блоков из данной библиотеки блоков можно получить из справочной системы. Рассмотрим наиболее распространенные источники типовых сигналов: блок Step (Ступенчатый сигнал) и блок Sin Wave (Генератор синусоиды).
|
|
|


- блок Step - блок Sin Wave
 Блок Step (Ступенчатый сигнал) реализует ступенчатую функцию. Параметрами блока являются время, когда подается ступенчатый сигнал, величина амплитуды в начальный момент времени и амплитуда ступенчатого сигнала.
Блок Step (Ступенчатый сигнал) реализует ступенчатую функцию. Параметрами блока являются время, когда подается ступенчатый сигнал, величина амплитуды в начальный момент времени и амплитуда ступенчатого сигнала.
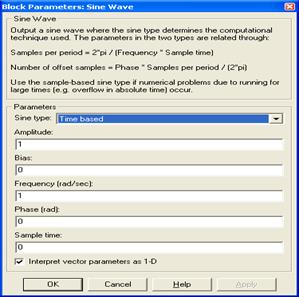 Для блока Sine Wave (Генератор синусоиды) в качестве параметров задается амплитуда, фаза и частота гармонического сигнала.
Для блока Sine Wave (Генератор синусоиды) в качестве параметров задается амплитуда, фаза и частота гармонического сигнала.
Для формирования сигналов сложной формы можно использовать линейное преобразование выходных переменных блоков из библиотеки Sources.
Блоки из библиотеки Continuous (Элементы непрерывных систем)
Библиотека блоков Continuous включает блоки, которые описывают модели непрерывных систем. Рассмотрим наиболее распространенные блоки: блок Integrator (Интегратор) и блок Transfer Fcn (Передаточная функция).


- блок Integrator - блок Transfer Fcn
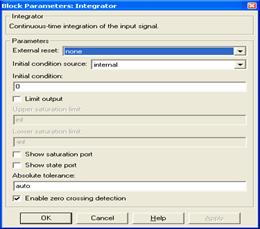 Блок Integrator (Интегратор) вычисляет значение интеграла. Может конфигурироваться как элемент интегратор со сбросом. Для задания начальных условий следует ввести значение в текстовое поле Initial condition (Начальные условия), которое по умолчанию задается равным 0.
Блок Integrator (Интегратор) вычисляет значение интеграла. Может конфигурироваться как элемент интегратор со сбросом. Для задания начальных условий следует ввести значение в текстовое поле Initial condition (Начальные условия), которое по умолчанию задается равным 0.
 Блок Transfer Fcn (Передаточная функция) формирует модель в виде передаточной функции, представленной в форме дробно-рациональной функции (отношение двух многочленов). Многочлены задаются коэффициентами в порядке убывания степеней переменной s. Диалоговое окно блока включает два текстовых поля: Numerator (Числитель) и Denominator (Знаменатель).
Блок Transfer Fcn (Передаточная функция) формирует модель в виде передаточной функции, представленной в форме дробно-рациональной функции (отношение двух многочленов). Многочлены задаются коэффициентами в порядке убывания степеней переменной s. Диалоговое окно блока включает два текстовых поля: Numerator (Числитель) и Denominator (Знаменатель).
Блоки из библиотеки Discrete (Элементы дискретных систем)
Библиотека блоков Discrete включает блоки, которые описывают модели дискретных систем. Рассмотрим наиболее распространенные блоки: блок Discrete Transfer Fcn (Дискретная передаточная функция) и блок Unit Delay (Задержка).


 - блок Discrete Transfer Fcn - Unit Delay
- блок Discrete Transfer Fcn - Unit Delay
|
|
|
 Блок Discrete Transfer Fcn (Дискретная передаточная функция) формирует модель в виде передаточной функции дискретной системы, представленной в форме дробно-рациональной функции (отношение двух многочленов). Многочлены задаются коэффициентами в порядке убывания степеней переменной z.
Блок Discrete Transfer Fcn (Дискретная передаточная функция) формирует модель в виде передаточной функции дискретной системы, представленной в форме дробно-рациональной функции (отношение двух многочленов). Многочлены задаются коэффициентами в порядке убывания степеней переменной z.
Блок Unit Delay (Задержка) вычисляет выходную переменную, которая принимает значение входной переменной в предыдущий момент квантования.
Блоки из библиотеки Math Operations (Математические функции)
Рассмотрим наиболее распространенные блоки: блок Gain (Коэффициент усиления) и блок Sum (Сумматор).


- блок Gaun - блок Sum
Блок Gain (Коэффициент усиления) выполняет матричное умножение или поэлементное умножение (попарное произведение элементов массивов согласованной размерности). В качестве операндов используются скаляры, векторы или матрицы.
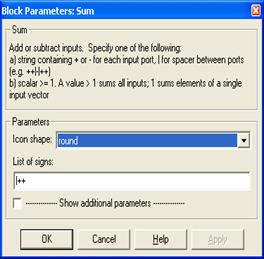
Блок Sum (Сумматор) вычисляет алгебраическое выражение, в котором входные переменные участвуют только в действиях сложения и вычитания. Количество входных портов и соответствующие знаки операций сложения и вычитания задаются как параметры блока.
Блоки из библиотеки Sinks (Средства регистрации)
Блоки из библиотеки блоков Sinks (Средства регистрации) служат для визуализации и сохранения результатов моделирования. Остановимся более подробно на двух блоках: блок Scope (Осциллограф) и блок XY Graph (Построение графика.
1) Блок Scope (Осциллограф) .

- блок Scope
Данный блок осуществляет построение графиков табличных функций, заданных в виде одномерного массива, соответствующего значениям аргумента (время), и массива входной переменной (вектор или скаляр), соответствующего значениям функции. Начальное значение по оси абсцисс для отображения данных всегда равно нулю, другой конец отрезка определяется величиной, называемой промежутком времени (Time range). Например, если в текстовом поле Time range задано значение 10, а конечное время моделирования равно 100, то переменные будут отображаться для значений времени, изменяющихся на отрезке [90, 100], хотя на графике абсцисса будет задаваться на отрезке [0, 10].
|
|
|
 Блок Scope предназначен для построения переходных процессов и обеспечивает возможность создания твердой копии. Переменным, размещенным в рабочей области, могут быть присвоены значения массивов или структур расчетных данных, построение графиков выполняется с помощью команды simplot системы Simulink или команды plot системы MATLAB.
Блок Scope предназначен для построения переходных процессов и обеспечивает возможность создания твердой копии. Переменным, размещенным в рабочей области, могут быть присвоены значения массивов или структур расчетных данных, построение графиков выполняется с помощью команды simplot системы Simulink или команды plot системы MATLAB.
Блок Scope может быть помещен в структурную схему и не иметь соединений с точками схемы, при этом он определяется как блок Floating Scope (Плавающий осциллограф). Данный блок предназначен для оперативного соединения с линиями связи путем выбора линии в процессе моделирования.
На рис 1. 6 показано диалоговое окно блока Scope, в верхней части которого расположена панель инструментов.
 Открытие диалогового окна блока Scope производится двойным нажатием левой кнопки мыши на изображении данного блока. Результаты моделирования представляются в виде графика, показанного на рисунке.
Открытие диалогового окна блока Scope производится двойным нажатием левой кнопки мыши на изображении данного блока. Результаты моделирования представляются в виде графика, показанного на рисунке.
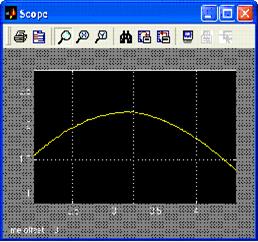 Для увеличения масштаба области графического окна, задаваемой выделяющим прямоугольником, необходимо выбрать пиктограмму Zoom, пост-роить выделяющий прямо-угольник и отпустить левую кнопку мыши. В результате в диалоговом окне блока Scope будет сформирован график, границы на осях которого будут определяться координатами вершин прямоугольника выделения.
Для увеличения масштаба области графического окна, задаваемой выделяющим прямоугольником, необходимо выбрать пиктограмму Zoom, пост-роить выделяющий прямо-угольник и отпустить левую кнопку мыши. В результате в диалоговом окне блока Scope будет сформирован график, границы на осях которого будут определяться координатами вершин прямоугольника выделения.
Данное диалоговое окно появляется при выборе пиктограммы Parameters панели инструментов окна Scope и имеет две вкладки. Вкладка General (Основная) (рис. 1. 7) в группе опций Axes (Оси) имеет несколько полей. В текстовом поле Number of axes (Число осей) задается число графиков, формируемых в окне блока Scope, и число входных портов блока Scope. Для каждого входного порта строится соответствующий график. Например, если в текстовом поле Number of axes вводится значение 2, то изображение окна блока Scope примет вид, показанный на рис. 1. 9. Установка флажка floating scope (Плавающий осциллограф) обеспечивает преобразование блока Scope в блок Floating Scope (Плавающий осциллограф), который позволяет графически представлять изменение переменных путем выбора линий связи в структурной схеме в процессе моделирования. Если в текстовом поле Time range (Промежуток времени) вводится значение auto, то границы на оси устанавливаются от нуля до значения конечного времени моделирования. Если в поле вводится некоторое положительное значение, то начальной точкой на оси абсцисс будет точка t=0, а предельное значение равно введенному.
|
|
|
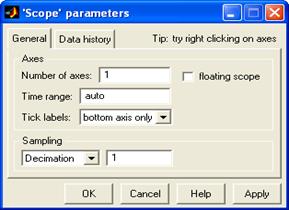
Рис. 1. 7. Вкладка General диалогового окна ‘Scope’ parameters
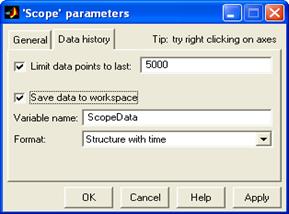
Рис. 1. 8. Вкладка Data history диалогового окна ‘Scope’ parameters

Рис. 1. 9. Окно блока Scope с двумя системами осей
Раскрывающийся список Tick labels включает следующие пункты: all — для обозначения обеих осей графика, попе — для отрисовки графика без обозначений и чисел на делениях, bottom axis only—- для вывода обозначения оси абсцисс.
Группа опций Sampling вкладки General включает раскрывающийся список из двух пунктов: Decimation (Прореживание) и Sample time (Период квантования). При выборе пункта Decimation в текстовом поле задается коэффициент прореживания, который является целым числом: если значение равно 1 (устанавливается по умолчанию), то на графике будет отображаться каждое значение входной переменной, если значение равно 2, то на график выводится каждая вторая точка и т. д. В случае выбора пункта Sample time в текстовом поле вводится значение времени квантования, определяющее моменты времени квантования по оси абсцисс.
Блок Scope позволяет сохранять массив или структуру входных данных в буфере памяти. Размер буфера оперативной памяти может быть задан на вкладке Data history (рис. 1. 8)установкой флажка limit data points to last и вводом значения максимальной размерности входного вектора в текстовое поле (по умолчанию задается 5000 точек). Данный буфер использует функции установки границ по осям, управления масштабом графика и хранения данных в рабочей области.
Допустим, что в поле Limits data point to last устанавливается значение 1000, однако, в процессе моделирования сформирован массив, содержащий 2000 точек, в этом случае только последние 1000 точек будут доступны в рабочей области после завершения моделирования.
Процедура получения твердой копии графика, построенного с помощью пиктограммы Print панели инструментов диалогового окна блока Scope, не обеспечивает выбора способов и задания параметров размещения твердой копии изображения модели на странице. Однако, если массивы выходных данных хранятся в рабочей области системы MATLAB, функции и команды системы MATLAB позволяют посылать данные для печати на принтер и сохранять их в файле. Для того чтобы разместить массив данных в рабочей области, необходимо установить флажок Save data to workspace и в текстовом поле Variable name задать имя переменной, которая создается в рабочей области системы MATLAB. Данной переменной присваивается значение массива данных, который формируется после завершения моделирования. В раскрывающемся списке Format представлен набор типов данных. В случае выбора пункта Array числовой массив данных формируется следующим образом: в первом столбце содержатся значения моментов времени моделирования, в следующих столбцах записываются значения компонентов вектора входной переменной блока Scope. Если вектор входной переменной блока включает два компонента, в рабочей области системы MATLAB будет размещаться двухмерный массив, содержащий три столбца, число строк которого равно числу значений моментов времени моделирования. В случае выбора позиций Structure создается массив записей, при этом содержимое поля time является пустым массивом. Для формирования массива записей, включающего вектор значений моментов времени, следует выбрать опцию Structure with time. Если массив данных моделирования хранится в рабочей области системы MATLAB, то для создания твердой копии и размещения ее на странице можно использовать команду simplot системы Simulink.
Задание границ осуществляется нажатием правой клавиши мыши в графической области окна блока. При выборе команды Axis properties появляется диалоговое окно 'Scope' properties: axis, которое содержит текстовые поля для ввода границ по оси ординат и заголовка графика. По умолчанию задается строка %< SignalLabel>, показывающая, что заголовком графика является обозначение входной переменной блока, если в текстовом поле Title (' %< SignalLabel> ' replaced by signal name): не введена строка с другим заголовком.
2) Блок XY Graph (Построение графика)

- блок XY Graph
Данный блок позволяет строить график функции и его действия схожи с теми, которые выполняет команда plot системы MATLAB. Блок XY Graph имеет два входных порта. Верхний входной порт служит для задания значений аргумента, нижний входной порт – для задания значений функции.
 В диалоговом окне блока задаются предельные значения по осям координат и период квантования.
В диалоговом окне блока задаются предельные значения по осям координат и период квантования.
Задание параметров моделирования
Создание математической модели физической системы включает в себя ряд этапов: математическую формулировку задачи, построение дискретной модели и реализацию численного метода на ЭВМ. Математический аппарат в большинстве случаев использует описание в виде дифференциальных и разностных уравнений.
В системе Simulink модель строится в виде структурной схемы, затем выполняются этапы анализа, синтеза и моделирования системы, используя выбранный численный метод. Для функции интегрирования задаются входные параметры: интервал интегрирования, шаг интегрирования, допустимые погрешности и др. Кроме этого, можно загружать переменные из рабочей области или размещать переменные в рабочей области системы MATLAB.
Методы численного решения задачи Коши для обыкновенных дифференциальных уравнений (ОДУ) реализуются в специальном решателе ОДУ. Диалоговое окно Simulation Parameters вызывается при выборе команды Simulation parameters меню Simulation окна модели (рис. 1. 10). Данное окно включает пять вкладок: Solver (Решатель), Workspace I/O (Импорт и экспорт данных рабочей области), Diagnostics (Диагностика), Advanced (Экспертные настройки) и Real-Time Workshop (Мастерская реального времени). Вкладка Solver (рис. 1. 10) используется для выбора функции интегрирования, установки значений ее параметров и опций. На вкладке Workspace I/O задаются параметры загрузки переменных из рабочей области и размещения массивов данных в рабочей области системы MATLAB.

Рис. 1. 10. Диалоговое окно Simulation Parameters
Вкладка Diagnostics используется для задания значений опций диагностики. Вкладка Advanced позволяет устанавливать значения опций для оптимизации процесса интегрирования. Вкладка Real-Time Workshop не рассматривается. Более подробное описание диалогового окна Simulation Parameters дается в Приложении 1.
Моделирование
Параметры и опции моделирования задаются как с помощью команд меню Simulation, так и с помощью пиктограмм панели инструментов окна модели. Для запуска моделирования выбирается команда Start меню Simulation или пиктограмма Start. Для прерывания моделирования в произвольный момент времени используется команда Stop меню Simulation или пиктограмма Stop на панели инструментов. Процесс моделирования запускается также из командной строки системы MATLAB.
В ходе моделирования обеспечивается редактирование ряда параметров. Например, изменяются значения коэффициента усиления блоков Gain, аргументы функции интегрирования (например, минимальный размер шага интегрирования) или выбираются линии связи, соединяющиеся с блоком Floating Scope для визуализации процесса моделирования.
|
|
|
