 |


Контрольные вопросы. Литература. Лабораторная работа № 4. Исследование линейных импульсных автоматических систем. Теоретические положения
|
|
|
|
Контрольные вопросы
1. Каковы алгоритмы выбора последовательного, параллельного и корректирующего устройства в цепи обратной связи?
2. Из каких соображений строится ЛАЧХ желаемой (скорректированной) системы?
3. Что такое кинетическая ошибка системы, как она вычисляется и от чего зависит? Как снять значение кинетической ошибки при цифровом моделировании скорректированной системы?
4. С помощью каких физических элементов можно реализовать построенные вами корректирующие устройства? Каковы параметры этих элементов?
5. Опишите порядок построения логарифмических частотных характеристик корректирующих устройств при последовательной, параллельной и коррекции с обратной связью.
Литература
. 1. Теория автоматического управления. Ч. I. Под ред. Нетушила А. В., М.: Высш. школа, 1982, 400 c.
ЛАБОРАТОРНАЯ РАБОТА № 4
Исследование линейных импульсных автоматических систем
Цель работы: исследование особенностей динамических процессов в импульсных системах, связанных с квантованием по времени, осуществляемым импульсным элементом; изучение вопросов устойчивости импульсных систем, приобретение навыков исследования временных и частотных характеристик импульсных систем.
Теоретические положения
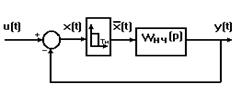
В работе рассматриваются процессы, протекающие в замкнутой импульсной системе, представленной на рис. 4. 1 с импульсным элементом (ИЭ), вырабатывающим последовательность импульсов, модулированную значениями сигнала отклонения (ошибки) системы x(t), в дискретные моменты времени (mТ, m=O, l,... N) и имеющую вид рис. 4. 2, где Т - период квантования, Ти - продолжительность импульса.
|
|
|
|
|

ИЭ
|
|
| Рис. 4. 1 Рис. 4. 2 |
Сигнал  (t)можно представить как выход идеального импульсного элемента (ИИЭ), вырабатывающего модулированную сигналом отклонения (ошибки) последовательность δ - функций x*(t), пропущенную через формирующее устройство с передаточной функцией
(t)можно представить как выход идеального импульсного элемента (ИИЭ), вырабатывающего модулированную сигналом отклонения (ошибки) последовательность δ - функций x*(t), пропущенную через формирующее устройство с передаточной функцией
 (рис. 4. 3).
(рис. 4. 3).
|
|
Рис. 4. 3
Тогда замкнутая система рис. 4. 1 может быть представлена структурной схемой рис. 4. 4 (а и б).

|
|

| |||||||||
 | |||||||||
 |  |  | |||||||

 -
-

Рис. 4. 4б
На рис. 4. 4 Wp*(p)) - дискретная передаточная функция разомкнутой импульсной системы, которая может быть получена из непрерывной передаточной функции с использованием следующего перехода:
Wp(p)=Wфи(р)Wнч(р

где L - непрерывное, D - дискретное преобразование Лапласа; Т – период квантования.
Проделаем этот переход для  ,
,

 ,
,
где n - степень полинома А(р); p1, p2, … pn - корни полинома А(р);
c-1, c0, c1, …, cn - коэффициенты, которые могут быть найдены методом неопределенных коэффициентов или по формуле разложения.
Весовая функция, соответствующая выражению в фигурных скобках, может быть записана в виде:
 ;
;
 ,
,
откуда легко получить:
Приведением к общему знаменателю это выражение можно представить в виде отношения двух полиномов, а именно:
 ,
,
где n - степень полиномов.
Передаточные функции замкнутой импульсной системы с единичной обратной связью (рис. 4. 4) можно рассчитать по формулам:
|
|
|
 ,
,  ,
,
где А*(р) - характеристический полином замкнутой системы степени n вида
 .
.
С использованием этих передаточных функций можно рассчитать установившиеся значения ошибок хуст на основании предельной теоремы дискретного преобразования Лапласа
 ,
,
где U*(p) - дискретное преобразование Лапласа от входного сигнала.
По передаточной функции замкнутой системы можно найти выходной сигнал в дискретные моменты времени с использованием разностного уравнения. При нулевых значениях входного и выходного сигналов для отрицательных моментов времени его можно получить из уравнения, записанного в изображениях с использованием дискретного преобразования Лапласа, которое имеет вид
 ;
;
или

Из вышеприведенного уравнения можно записать разностное уравнение:

или

Используя характеристическое уравнение замкнутой импульсной системы А*(р) и производя подстановку

получаем характеристическое уравнение относительно переменной V (A(V)=0), для которого можно использовать критерий Гурвица, сформулированный для непрерывных систем.
По дискретной передаточной функции разомкнутой импульсной системы могут быть получены выражения комплексного коэффициента усиления импульсной разомкнутой САР. Для этого в выражении Wp*(p) должна быть произведена замена оператора р на комплексное число jω и использована формула Эйлера

 .
.
Годограф разомкнутой импульсной системы строится при изменении ω в диапазоне [0, ω 0/2], где ω 0 = 2π /Т - частота квантования сигнала. На рис. 4. 5 представлен пример годографа разомкнутой импульсной системы.
Годограф не охватывает точку с координатами (-1; j0) и, следовательно, в соответствии с критерием Найквиста для устойчивой разомкнутой системы, соответствующая замкнутая импульсная система - устойчива и обладает некоторым запасом устойчивости по амплитуде Δ А, по которому можно найти значение предельного коэффициента усиления Кпред, с использованием пропорции:
К ~ (1-Δ А)
Кпред ~ 1.
Коэффициент усиления разомкнутой импульсной системы определяется, исходя из следующих соотношений:
|
|
|
