 |


1. 4. 4. Выводы. 2. Формирование и анализ оптимального раскроя плитных материалов. 2. 1 Задача оптимального раскроя плитных материалов.
|
|
|
|
1. 4. 4. Выводы
Характер полученной расчетами кривой на графике соответствует теоретически ожидаемому. Полученное графоаналитическим методом значение постоянной времени Т = 54, 4 мин близко к значению постоянной времени Т = 54, 614 мин, рассчитанному аналитически. Некоторая величина расхождения между этими двумя значениями объясняется масштабом и погрешностями построения графика.
2. ФОРМИРОВАНИЕ И АНАЛИЗ ОПТИМАЛЬНОГО РАСКРОЯ ПЛИТНЫХ МАТЕРИАЛОВ.
2. 1 Задача оптимального раскроя плитных материалов.
Плиты одного из стандартных форматов подлежат раскрою на заготовки двух типоразмеров.
Допустим, возможно осуществить две схемы раскроя на двух имеющихся видах оборудования — станках 1 и 2. Для раскроя плиты на станке 1 по карте раскроя № 1 требуется 2 мин, по карте №2 — 4 мин, а на станке 2 по тем же картам раскроя требуется 3 мин и 9, 6 мин соответственно. Суммарное время работы станка 1 не должно превышать 240мин, а станка 2 — 480 мин.
По первому варианту раскроя можно получить 2 заготовки первого типоразмера, 25 заготовок второго и 4 заготовки третьего типоразмеров. Вторая схема раскроя позволяет разместить 10, 3 и 2 заготовки типоразмеров 1, 2 и 3 соответственно. По схеме раскроя № 1 —площадь отходов 4000 мм2, по второй 2500 мм2. Требуется получить не менее 100 заготовок первого, не менее 250 заготовок второго и не менее 80 заготовок третьего типоразмера.
Решая задачу, следует выяснить, сколько плит надо раскроить по каждой из рассмотренных карт раскроя при выполнении планового задания на имеющемся оборудовании; при этом суммарное количество отходов должно быть минимальным.
Представим исходные данные в виде табл. 3. 1.
|
|
|
Таблица 2. 1
| Номер схемы раскроя | Отходы плиты, мм2 | Норма времени раскроя на станке, мин | Количество заготовок, шт., типоразмера | |||
| 9, 6 | ||||||
| Фонд времени, мин | – | – | – | |||
| План выпуска заготовок, шт. | ||||||
Обозначим через x1 количество плит, раскраиваемых по первой схеме, через x2 – по второй схеме раскроя.
Выражение для суммарного количества отходов имеет вид
 (2. 1)
(2. 1)
и представляет минимизированную целевую функцию задачи линейного программирования.
Выражения для ограничений по требуемому количеству заготовок:
 (2. 2)
(2. 2)
Выражения для ограничений по длительности работы станков 1 и 2:
 (2. 3)
(2. 3)
Наконец, следует учесть естественные ограничения на неотрицательность переменных:
 (2. 4)
(2. 4)
Совокупность соотношений (2. 1)-(2. 4) представляет собой математическую модель данной задачи.
2. 2 Решение задачи линейного программирования
Графический метод является одним из способов решения задачи линейного программирования в том случае, когда модель содержит только две переменные. Для трех переменных графическое решение задачи становится менее наглядным, а при большем числе переменных — невозможным.
Построим область допустимых решений, в которой одновременно удовлетворяются все ограничения модели.
|
|
|
Область допустимых значений, определяемая ограничением, на требуемое количество заготовок первого типоразмера, находится заменой в ограничении знака неравенства на знак равенства:
 (2. 5)
(2. 5)
и нахождением точек пересечения прямой (2. 5) с осями координат
при x1=0 x2=100/10=10,
при x2=0 x1=100/2=50.
Область, в которой выполняется ограничение в виде неравенства, указывается стрелкой, направленной в сторону допустимых значений переменных. Аналогично строятся области допустимых значений переменных и для других ограничений из (2. 2) и (2. 3).
Искомая область допустимых решений показана на рис. 2. 1, где линии (/), (2), (3) отображают ограничения (2. 2), а линии (4), (5) — ограничения (2. 3).
 Рис. 2. 1 Построение области допустимых решений задачи оптимального
Рис. 2. 1 Построение области допустимых решений задачи оптимального
раскроя плитных материалов.
При построении области допустимых решений необходимо учитывать условия неотрицательности переменных (  и
и  ), которые ограничивают область их допустимых значений первым квадрантом (часть плоскости, расположенной над осью x1и правее оси x2)
), которые ограничивают область их допустимых значений первым квадрантом (часть плоскости, расположенной над осью x1и правее оси x2)
Таким образом, построена область ABCDEFA, внутри которой и на границах которой выполняются все ограничения.
Для нахождения оптимального решения в задачах минимизации выясняется направление убывания, а в задачах максимизации — возрастания целевой функции.
Зададимся координатами двух произвольно выбранных, принадлежащих области допустимых решений точек  .
.
Пусть  тогда значение целевой функции в точках A1 и A2
тогда значение целевой функции в точках A1 и A2
 (2. 6)
(2. 6)
 (2. 7)
(2. 7)
Построив прямые  (см. рис. 2. 2), соответствующие выражениям (2. 6), (2. 7), определим направление убывания целевой функции.
(см. рис. 2. 2), соответствующие выражениям (2. 6), (2. 7), определим направление убывания целевой функции.
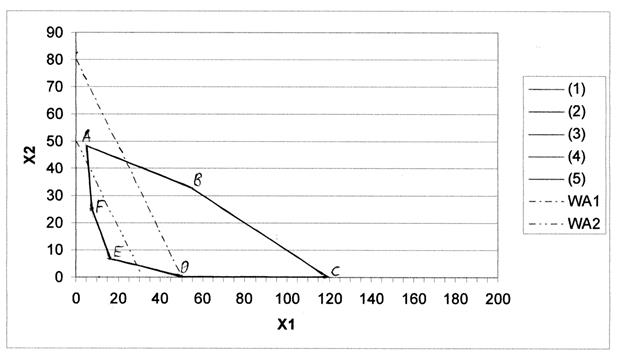 Рис. 2. 2 Определение направления убывания целевой функции.
Рис. 2. 2 Определение направления убывания целевой функции.
Чтобы найти оптимальное решение, следует перемещать прямую, характеризующую суммарные отходы, параллельно прямой WA1 по направлению к началу координат, пока она не пересечется с точкой Е, которая и является оптимальной точкой. Дальнейшее смещение прямой WA1 в этом направлении будет приводить к попаданию в область недопустимых решений.
|
|
|
Координаты оптимальной точки Е можно определить графически по рис. 2. 2 и аналитически как точки пересечения прямых (/) и (3), для чего необходимо решит систему уравнений:
 (2. 8)
(2. 8)
Решив систему, получим  . Тогда оптимальное значение целевой функции будет равно:
. Тогда оптимальное значение целевой функции будет равно:

Вспомним, что через x1 и х2 мы обозначили интенсивность использования схем раскроя первой и второй соответственно, т. е. переменные x1 и x2 по смыслу задачи должны быть целочисленными. Если условия целочисленности наложены на все переменные задачи, то она называется полностью целочисленной. В рассмотренном выше примере была решена непрерывная задача оптимального раскроя без учета целочисленности решений. Поэтому для получения окончательного решения необходимо произвести округление координат полученного оптимума до допустимых целых значений так, чтобы полученное округленное решение принадлежало области допустимых решений. В нашем примере получим  . Для принятых значений x1 , х2 необходимо рассчитать значение целевой функции. Итак, окончательно имеем оптимальное значение с учетом целочисленности решений
. Для принятых значений x1 , х2 необходимо рассчитать значение целевой функции. Итак, окончательно имеем оптимальное значение с учетом целочисленности решений

|
|
|
