 |


Многошпиндельные токарные полуавтоматы
|
|
|
|
Многошпиндельные токарные полуавтоматы предназначены для изготовления деталей из штучных литых, кованых и штампованных заготовок из различных марок сталей, чугуна, цветных металлов и сплавов. Большинство деталей, изготавливаемых на этих полуавтоматах, имеет длину меньше диаметра и поэтому они закрепляются в патронах. Многошпиндельные полуавтоматы выпускаются с
горизонтальным и вертикальным расположением рабочих шпинделей.
Горизонтальные полуавтоматы строятся на базе аналогичных моделей многошпиндельных автоматов и поэтому большинство их узлов и механизмов имеет такую же конструкцию и рабочие характеристики. Значительное отличие в конструкции имеет только узел рабочего шпинделя, так как съем готовой детали и установка заготовки в патроне осуществляются вручную. Для этого в конструкции всех шпинделей полуавтомата предусмотрена возможность выключения их вращения и торможения в позиции загрузки (IV, VI - рис. 3.22 или VIII, соответственно, в четырех, шести и восьмишпиндельных полуавтоматах), а также установлены гидрофицированные механизмы зажима и разжима заготовок. Поперечный суппорт в позиции загрузки не устанавливается.
На рис. 3.38 показан шпиндельный блок шестишпиндельного горизонтального полуавтомата, конструкция которого, за исключением шпиндельного узла, почти полностью повторяет конструкцию базовой модели автомата (сравните рис. 3.25). В передней опоре шпинделя установлены двухрядный роликовый подшипник 13 и упорно-радиальный шарикоподшипник 12, а в задней - два радиально-упорных шарикоподшипника 9.
Вращение шпиндель получает от центрального зубчатого колеса 15 через колесо 7 и фрикционную муфту 6. Торможение шпинделя осуществляется фрикционной муфтой 3. Заготовка зажимается в патроне 14 при смещении тяги 11 влево пакетом тарельчатых пружин
|
|
|
10, а разжим производится поршнем 4, шток 8 которого свинчен с тягой
11. Включение-выключение фрикционных муфт 3 и 6 осуществляет плавающий цилиндр 5. При подаче масла в левую полость цилиндра поршень 4 смещается вправо, сжимая пакет тарельчатых пружин и разжимая заготовку, а цилиндр 5 - влево, выключая приводную муфту 6 и включая тормозную муфту 3. Переключение муфт перед началом рабочего цикла производится подачей масла под давлением в правую полость цилиндра. Масло в полости цилиндров всех шпинделей подводится через центральный золотник 1, поворотом которого с помощью рукоятки 2 можно осуществить разжим заготовки и выключение-включение вращения рабочего шпинделя на любой позиции полуавтомата. Наладка этих полуавтоматов практически не отличается от наладки базовых моделей горизонтальных многошпиндельных автоматов.
Вертикальные многошпиндельные токарные полуавтоматы по принципу своей работы могут быть параллельного и последовательного действия. Схема работы полуавтомата параллельного действия приведена на рис. 3.39. Карусель 1 полуавтомата с расположенными по окружности рабочими шпинделями и индивидуальными для каждой позиции суппортами 2 медленно поворачивается относительно основания 5 вокруг колонны 4 и установленной на ней группы кулачков 3.


Рис. 3.39. Схема работы вертикального многошпиндельного полуавтомата параллельного действия (а), с непрерывным вращением карусели (б) и с периодическим поворотом карусели (в).
Обработка заготовки от начала до конца производится на одной позиции и только одной группой инструментов за время почти полного оборота карусели. Готовая деталь снимается с полуавтомата после каждого поворота карусели на одну позицию. Съем готовой детали и установка заготовки производятся на этих полуавтоматах или на ходу (рис. 3.39, б) во время прохождения зоны загрузки или с остановкой в данной позиции (рис. 3.39, в). В позиции загрузки (зоне) шпиндель не вращается, а суппорт отходит в верхнее положение. Для облегчения условий работы в этой зоне предусматривается специальное подъемное устройство.
|
|
|
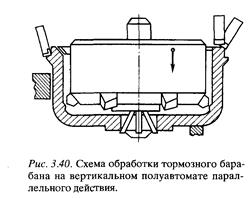
Технологические возможности полуавтоматов этого типа ограничены и поэтому на них обрабатываются более простые заготовки. На рис. 3.40 показана схема обработки заготовки на шестишпиндельном полуавтомате параллельного действия, у которого на пяти позициях производятся одни и те же операции группой инструментов из 15 резцов, установленных на резцовых головках.
Обработка заготовок на вертикальных полуавтоматах последовательного действия (рис. 3.41) производится несколькими группами инструментов, закрепленных на суппортах 2, которые размещены на гранях неподвижной колонны 3. Заготовки крепятся в патронах 1 вращающихся вертикальных шпинделей, расположенных по окружности в общем шпиндельном блоке в виде поворотного стола 4, который периодическим поворотом относительно неподвижных оснований 5 и колонны 3 осуществляет смену позиций.
За один оборот стола заготовка последовательно проходит через все позиции, подвергаясь полной обработке, и после каждого поворота стола на одну позицию с полуавтомата снимается готовая деталь. Вращение шпинделей в каждой позиции осуществляется от


индивидуальных приводов, а при смене позиций и в позиции загрузки они не вращаются. Поперечных суппортов на вертикальных полуавтоматах нет и для получения в отдельных позициях полуавтоматов последовательного действия поперечной подачи инструментов используются специальные суппорты, в которых продольное перемещение преобразуется в поперечное.
На рис. 3.42 показана схема обработки заготовки на вертикальном восьмишпиндельном полуавтомате последовательного действия, в которой на III и IV позициях с поперечной подачей производятся подрезание торца, снятие фаски и протачивание выточки и канавки. Кроме того, в данном примере используется специальное приспособление для растачивания внутренней сферы на VI и VII позициях.
|
|
|
Основные технические характеристики вертикальных полуавтоматов приведены в таблице 3.6.
Все вертикальные многошпиндельные полуавтоматы имеют практически одинаковую компоновку, а отличия в устройстве и конструкции отдельных узлов связаны главным образом с принципом работы полуавтомата. Ниже рассматривается только полуавтомат последовательного действия, как более сложный в конструктивном отношении.
На рис. 3.43 приведена компоновка восьмишпиндельного полуавтомата последовательного действия мод. 1К282, на осно-

Рис. 3.42. Схема обработки чашки дифференциала на вертикальном полуавтомате последовательного действия.

Рис. 3.43. Компоновка вертикального восьмишпиндельного полуавтомата мод. 1К282.
вании 14 которого смонтированы все основные узлы и механизмы станка. В тумбе основания закреплена основная несущая часть полуавтомата - пустотелая колонна 9, у которой внизу на конусе смонтирован поворотный стол 12 с рабочими шпинделями 11, в средней части -направляющие для суппортов 2, а сверху с помощью венца 8 семь коробок скоростей и подач 4, электродвигатель 6 с редуктором 7 и стойка 5 с гидроцилиндром для включения через тягу 10 семи синхронизаторов 16 и тормоза 15. Вращение на шпиндели от коробок скоростей передается валами 3, размещенными внутри колонны. Механизм поворота и фиксации 13 стола установлен в нише основания, которая одновременно является резервуаром гидросистемы 
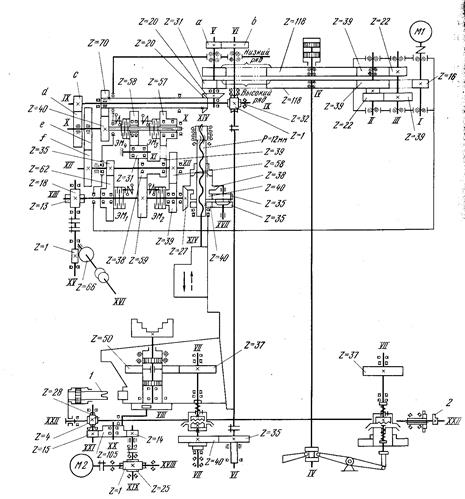
Рис. 3.44. Кинематическая схема вертикального многошпиндельного полуавтомата мод. 1К282.
станка. Электрооборудование полуавтомата смонтировано в специальном шкафу 1.
Кинематическая схема этого полуавтомата показана на рис. 3.44. Она включает следующие кинематические цепи: привод главного движения, приводы рабочей и ускоренной подач суппортов, вращения ко-мандоаппарата и привода механизма поворота стола.
Привод главного движения осуществляется от двигателя М1 через зубчатые колеса редуктора 16/39 и далее 39-118-31 (при высоком ряде частот вращения) или через 22/39, 22/39 и 39-118-31 (при низком ряде частот вращения). С вала V вращение передается через гитару сменных зубчатых колес а и b, зубчатые колеса 35/40, 37/50 (37/37 при
|
|
|
скоростном исполнении). Каждый шпиндель, находящийся в рабочей позиции, имеет индивидуальную цепь привода, начиная с вала V.
Привод рабочей подачи суппортов осуществляется от вала VI через червячную передачу 1/32, сменные колеса с,d,е и f и далее через зубчатые колеса 35/62 (включена муфта ЭМ1) или 58/39 (включена муфта ЭМ2) на вал XIII. С этого вала через коническую передачу 27/38 вращение передается гайке и от нее ходовому винту (tхв = = 12 мм) с суппортом. Переключение муфт ЭМ1 и ЭМ2 можно производить в процессе обработки, получая две рабочие подачи суппорта: мелкую и крупную.
Привод ускоренной подачи суппортов осуществляется от вала V через конические колеса 20/20 и цилиндрические 70/40 на вал X. При ускоренном подводе суппорта включается муфта ЭМЗ, и вращение передается через зубчатые колеса 57/39, 38/59, 27/38 на гайку ходового винта, а при ускоренном отводе суппорта (включается муфта ЭМ4) вращение на гайку ходового винта передается через зубчатые колеса: 58-31-38-59 и 27/38. При переходе с высокого ряда частот вращения на низкий для сохранения постоянной скорости ускоренного перемещения суппорта необходимо поменять местами колеса в передаче 70/40 между валами IX и X. Скорости быстрого подвода и отвода суппорта соответственно равны 3,6 и 3,5 м/мин.
Привод вращения командоаппарата осуществляется от вала ХIII че-рез винтовую зубчатую передачу 18/13 и червячную 1/66.
Привод механизма поворота стола осуществляется от электродвигателя М2 через червячную передачу 1/25, зубчатые колеса 14/105 к мальтийскому механизму. Водило мальтийского механизма

Рис. 3.45. Опора поворотного стола вертикального полуавтомата мод. 1К282.
смонтировано на ступице колеса 2 = 105, а мальтийский крест на нижней плоскости поворотного стола, который может быть повернут на 1/8 или 1/4 (на две позиции) часть оборота.
Управление поворотом и фиксацией стола осуществляется кулачками, установленными на правом конце вала XXII, нажатием на соответствующие конечные выключатели. Кроме поворота через червячную передачу 4/28, вал XXII получает осевое перемещение от гидроцилиндра 1 при фиксации и расфиксации стола.
Поворотный стол с восьмью шпиндельными узлами смонтирован и вращается на конусной части колонны и на специальном двойном упорном шарикоподшипнике (рис. 3.45), воспринимающем вертикальную нагрузку. Он включает

Рис. 3.46. Шпиндельный узел вертикального полуавтомата мод. 1К282.
верхнее 9 и нижнее 1 кольца с желобами - дорожками качения и среднее кольцо - фланец 5, между которыми заложены шарики 2 и 6, закрытые ленточным уплотнением 7 и кожухами 4 и 8. Натяг в упорном подшипнике регулируется винтами 10, а радиальный зазор в конусной радиальной опоре стола (на рис. не показана) путем пригонки компенсаторных секторов 3.
|
|
|
Шпиндельный узел (рис. 3.46) является самымответственным узлом полуавтомата, определяющим точность и чистоту обработки. Шпиндель 1 смонтирован в конических роликовых подшипниках 3 в стакане 4, который устанавливается в расточенном отверстии поворотного стола. Нижний конец шпинделя поддерживается радиальным шарикоподшипником. На фланце шпинделя 7 крепится кулачковый патрон, зажим-разжим заготовки в котором производится, соответственно, при опускании и подъеме тяги 6, установленной в центральном отверстии шпинделя. Тяга свинчена со штоком 5, на котором смонтированы поршни 9 и 11 сдвоенных гидроцилиндров 10 и 12. Для надежности переключения тяговое усилие при разжиме развивается больше, чем при зажиме. Это достигается подачей масла при зажиме в штоковые полости гидроцилиндров через отверстия 19, 20, 18, 17 и выточку 13 в шпинделе, а при разжиме - в поршневые полости через отверстия 22, 21, 16, 15 и зазор 14 в нижний гидроцилиндр, а через шлицевые каналы в штоке 5 - в верхний. Вращение шпинделя с частотой, настроенной в данной рабочей позиции, осуществляется от привода главного движения через узел синхронизации и зубчатые колеса 8-2. (Станочное оборудование автоматизированного производства. Т.2. Под ред. В.В. Бушуева. – М.: Изд-во «Станки», 1994.-656 с.)
|
|
|
