 |


Рекомендации по расширению функциональности типовой матрицы рисков
|
|
|
|
6.5.1 Рекомендации по отображению точек риска, выходящих за пределы поля ячеек матрицы риска.
Одной из проблем матрицы рисков является ситуация, когда точка риска не попадает в границы поля ячеек матрицы рисков. Выше был рассмотрен вариант решения данной проблемы путем увеличения диапазонов шкал частот, последствий и рисков. Но данный вариант требует перестроения матрицы рисков, включая пересчет значений шкал частот и последствий. Поэтому представляет интерес задача введения в матрицу рисков дополнительных элементов, позволяющих в компактном виде, пусть даже с потерей точности, отображать любые сочетания частоты и удельного размера последствий, лежащие за пределами шкал матрицы рисков.
Для выполнения указанных требований рекомендуется расширенная матрица рисков, где для отображения рисков, лежащих вне диапазонов шкал, применяются дополнительные элементы.
Поставленная задача заключается в том, чтобы ввести в матрицу рисков дополнительные области, позволяющие качественно (с указанием категории риска) отобразить значения частоты и/или удельного размера последствий, выходящие за пределы диапазона шкал частот (F min… F max) и (C min… C max)последствий матрицы рисков (Рисунок 6.6).
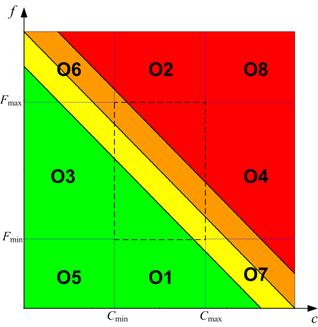
Рисунок 6.6 – Области значений рисков, лежащих за пределами поля ячеек матрицы рисков
На рисунке 6.6 вся область системы координат, не охваченная полем ячеек матрицы рисков, поделена на 8 сегментов:
- O1 – F < F min, C min £ C £ C max;
- O2 – F > F max, C min £ C £ C max;
- O3 – C < C min, F min £ F £ F max;
- O4 – C > C max, F min £ F £ F max;
- O5 – F < F min, C < C min;
- O6 – F > F max, C < C min;
- O7 – F < F min, C > C max;
- O8 – F > F max, C > C max.
Очевидно, что возможные категории риска для каждого из сегментов O1…O8 зависят от конкретной конфигурации матрицы. Рассмотрим конфигурацию размерностью 6 x 4 с m = 1,5 (рисунок 6.7).
|
|
|

Рисунок 6.7 – Возможные категории риска для каждого из сегментов O1…O8 (матрица размерностью 6 x 4 с m = 1,5)
Из рисунка 6.7 очевидно, что сегмент O1 пересекают прямые R = R доп/ K и R = R доп/ K 2. Из этого следует, что в сегменте O1 будут присутствовать категории риска, где R £ R = R доп/ K 2 (риск, не принимаемый в расчет), R доп/ K 2 < R £ R доп/ K (допустимый риск) и R доп/ K < R £ R доп (нежелательный риск). Поскольку прямая R = R доп не пересекает данный сегмент, то недопустимые риски в нем присутствовать не будут.
Аналогично рассуждая для других сегментов, получим следующие возможные категории:
- O1 – риск, не принимаемый в расчет, допустимый риск, нежелательный риск;
- O2 – допустимый риск, нежелательный риск, недопустимый риск;
- O3 – риск, не принимаемый в расчет, допустимый риск;
- O4 – нежелательный риск, недопустимый риск;
- O5 – риск, не принимаемый в расчет;
- O6, O7 – риск, не принимаемый в расчет, допустимый риск, нежелательный риск, недопустимый риск;
- O8 – недопустимый риск.
Исходя из полученных результатов, в типовую матрицу рисков вводятся дополнительные элементы, позволяющие отобразить точки риска, выходящие за пределы поля ячеек – области (их границы на рисунке обозначены розовыми прямоугольниками), которые разделяются по углам поля ячеек матрицы штриховыми линиями. Также штриховые линии проведены от левой и нижней границ поля ячеек к меткам шкал частот и последствий. Таким образом, точка риска, попадающая за пределы области поля ячеек, может быть отображена в дополнительных полях. При этом она заключается в квадрат, закрашиваемый по цветовому коду соответствующей категории риска (см. рисунок 6.8).

Рисунок 6.8 – Расположение дополнительных элементов в матрице рисков
Представленная модификация матрицы рисков позволяет также отображать риски, где частота либо удельный размер последствий равны 0 (в области O5).
|
|
|
Форма расширенной матрицы рисков приведена в Приложении Б.
6.5.2 Рекомендации по повышению точности принадлежности точки риска к категории риска
Как было показано выше (п. 5.4), классический подход к построению матрицы рисков на основе ячеек имеет конечную погрешность; при этом трудно обеспечить погрешность лучше 10%.
При оценке риска могут возникнуть случаи, когда погрешность оценивания риска на уровне 10% является недопустимой. Тогда возникает задача модификации матрицы рисков для реализации погрешности, близкой к нулю.
Поскольку наиболее точной из графических форм представления результатов оценки риска является график риска, можно преобразовать поле ячеек в область системы координат, нарушив при этом принятые выше правила присвоения ячейкам категорий риска. Если допустить, что ячейка является условным элементом и может отображать риски не одной, а двух категорий, то в случае применения такой матрицы рисков любая точка риска будет (в соответствии с цветовым кодом) принадлежать той области значений, в которой находится ее количественный уровень риска. Таким образом, погрешность оценивания риска будет минимальной.
Форма поля ячеек матрицы рисков высокой точности приведена в Приложении В.
|
|
|
