 |


4.1. Силовое исследование плоских рычажных механизмов
|
|
|
|
4. 1. Силовое исследование плоских рычажных механизмов
В предыдущих разделах были рассмотрены вопросы строения и кинематики плоских рычажных механизмов. Во время работы механизма его звенья подвергаются действию различных внешних сил, в результате чего в кинематических парах возникают реакции, являющиеся причиной потерь на трение. Для определения реакций в кинематических парах проводится силовое исследование механизма.
Основные задачи силового исследования механизмов – это определение
1) сил, действующих на звенья механизма;
2) реакций в кинематических парах;
3) уравновешивающей силы (момента).
Силовой анализ механизма основан на принципе Даламбера, сущность которого заключается в том, что каждое звено может рассматриваться в условном статическом равновесии, если к нему помимо всех действующих внешних сил приложить инерционную нагрузку в виде силы инерции и момента пары сил инерции. При этом условии для каждого звена справедливы равенства:
 (4. 1)
(4. 1)
 (4. 2)
(4. 2)
поэтому неизвестные силы (реакции в кинематических парах) могут определяться методом статики.
Для проведения силового анализа кинематическая цепь должна быть статически определяемой, т. е. число неизвестных параметров реакций должно быть равно количеству уравнений статики, которые можно составить для их определения.
Начинать силовой анализ следует с наиболее удаленной от ведущего звена структурной группы.
4. 2. Определение сил, действующих на звенья механизма
Основными силами, определяющими характер движения механизма, являются движущие силы, совершающие положительную работу и приложенные к ведущим звеньям, и силы полезного сопротивления, прикладываемые к ведомым звеньям и совершающие отрицательную работу. Силы полезного сопротивления --- это силы, для преодоления которых предназначен механизм. Кроме этих сил необходимо учитывать силы сопротивления окружающей среды, трения в кинематических парах, тяжести, инерции.
|
|
|
Определение сил тяжести (если не заданы в задании) производится с помощью коэффициента q Н/мм, выражающего вес одного миллиметра длины звена в ньютонах. Зная значение длины (li) всех звеньев, определяем вес каждого звена (Fi), т. е. силу тяжести, Н:
 . (4. 3)
. (4. 3)
Если в составе механизма есть ползуны, а в условии не заданы значения их веса или массы, то вес каждого ползуна условно принимается равным 1000 q.
Вычисление массы каждого звена производится из соотношения, Н:
 (4. 4)
(4. 4)
где  – масса звена, кг,
– масса звена, кг,
 ; (4. 5)
; (4. 5)
9, 81 – ускорение свободного падения, м/с2.
Определение сил инерции и моментов пар сил инерции производится в зависимости от характера движения звеньев:
1) если звено движется поступательно (ползун), то его момент инерции Ми = 0, сила инерции  направлена против ускорения центра масс
направлена против ускорения центра масс  , Н:
, Н:
 ; (4. 6)
; (4. 6)
2) если звено совершает неравномерное вращательное движение (коромысло) вокруг оси, не проходящей через центр тяжести (см. рис. 3. 1, а, звено О2В), то на это звено действуют момент пары сил  , направленный в сторону, противоположную направлению углового ускорения звена
, направленный в сторону, противоположную направлению углового ускорения звена  , и сила инерции
, и сила инерции  , направленная в сторону, противоположную вектору абсолютного ускорения центра масс
, направленная в сторону, противоположную вектору абсолютного ускорения центра масс  , и приложенная в центре масс звена si:
, и приложенная в центре масс звена si:
 ; (4. 7)
; (4. 7)
|
|
|
 , (4. 8)
, (4. 8)
где  – момент инерции звена относительно оси, проходящий через центр тяжести, кг·м2;
– момент инерции звена относительно оси, проходящий через центр тяжести, кг·м2;
 – длина звена, м.
– длина звена, м.
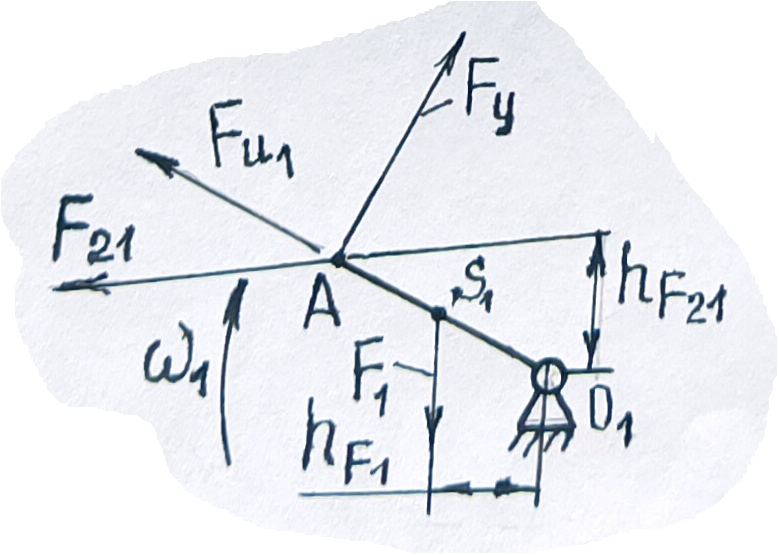
На звене О2В (коромысле), совершающем вращательное движение относительно оси, не проходящей через центр тяжести, допускается силу инерции  прикладывать не в центре тяжести S3, а в центре качания звена (точка К), расположенном на расстоянии О2К (О2К = 0, 7·О2В). В этом случае момент инерции
прикладывать не в центре тяжести S3, а в центре качания звена (точка К), расположенном на расстоянии О2К (О2К = 0, 7·О2В). В этом случае момент инерции  определять не нужно (рис. 4. 1, а);
определять не нужно (рис. 4. 1, а);
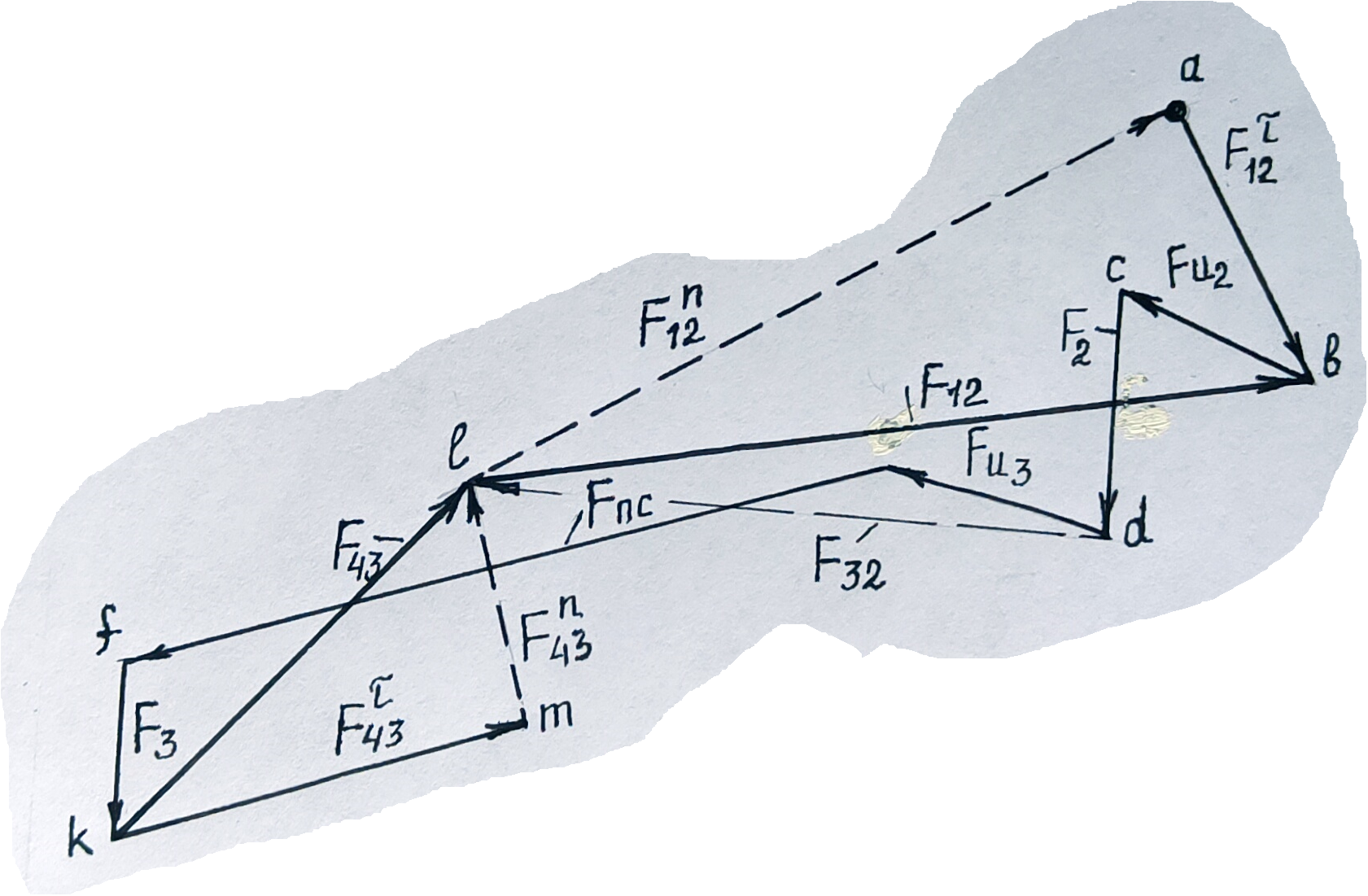
3) если звено совершает плоскопараллельное движение (шатун, см. рис. 3. 1, а, звено АВ), на него действуют момент пары сил инерции  , направленный противоположно угловому ускорению
, направленный противоположно угловому ускорению  , и сила инерции
, и сила инерции  , направленная противоположно вектору абсолютного ускорения центра масс звена
, направленная противоположно вектору абсолютного ускорения центра масс звена  и приложенная в центре тяжести звена si (см. рис. 4. 1, а).
и приложенная в центре тяжести звена si (см. рис. 4. 1, а).
Силы полезного сопротивления Fпс заданы, они приложены к ведомому звену. Направление силы полезного сопротивления следует выбрать противоположным скорости точки приложения этой силы (см. план скоростей данного механизма).

| 
|
| а | б |
| 
|
| в | г |
| Рис. 4. 1 | |
Силы вредных сопротивлений, к которым относятся силы сопротивления окружающей среды и силы трения, ввиду ограничения объема курсового проекта не учитываются.
|
|
|
