 |


4.1. Расчет последовательного корректирующего устройства
|
|
|
|
4. 1. Расчет последовательного корректирующего устройства
осуществляется по известной формуле для ЛАЧХ последовательного соединения звеньев. В частности, L*(w) = LН(w) + LКПС(w), откуда
| LКПС(w)=L*(w) - LН(w) |
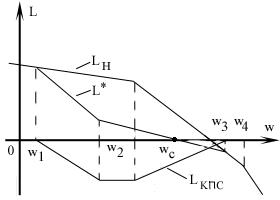 Пример: по характеристике LКПС(w) в справочной литературе можно найти схему реализации корректирующего устройства в виде, например, пассивного RC – четырехполюсника:
Пример: по характеристике LКПС(w) в справочной литературе можно найти схему реализации корректирующего устройства в виде, например, пассивного RC – четырехполюсника:
| Рис 4. 14. 4 |

| Рис 4. 14. 5 |
4. 2. Расчет корректирующей обратной связи
производится как правило приближенно. Он осуществляется только для существенного диапазона частот, в котором выполняется неравенство:
| WНО |
| WО |
| WКОС |
| WН |
| + |
| - |
| - |
| + |
Для этого диапазона:
| 5. 1 |
 .
.
| LKOC(w) = LН(w) – L*(w) - LO(w) |
L*(w) = LН(w) – L0(w) – LKOC(w) или
| 5. 1 |

L0(w) + LKOC(w) > 0.
| Рис 4. 14. 5 |
| Рис 4. 14. 6 |

4. 15. Синтез САР на основе модального управления
Пусть объект управления (ОУ) описывается векторно-матричным уравнением
| n x 1 – матрица-столбец |
| n x n |
 (4. 12)
(4. 12)
а регулятор – уравнением
| 1 x n – матрица-строка |
 (4. 13)
(4. 13)
Тогда, объединяя уравнения (4. 12) и (4. 13), можно найти уравнение замкнутой САР
|
|
|
 (4. 14)
(4. 14)
Синтез САР на основе модального управления сводится к выбору такой матрицы Р, чтобы придать матрице А–ВР заранее предписанное расположение ее собственных значений, то есть корней характеристического уравнения системы.
Например, чтобы все корни были одинаковыми, действительными, отрицательными и по модулю равными w0. Такие корни соответствуют биномиальной стандартной форме левой части характеристического уравнения системы
A(S) = Sn + a1Sn-1 + … + an = (S + w0)n = 0. (4. 15)
Левая часть этого уравнения – это бином Ньютона. В этом случае переходная характеристика САР будет иметь монотонный характер. А время регулирования будет тем меньше, чем больше будет значение w0.

|
S + w0 при n=1;
A(S) = S2 + 1. 4w0S + w02 при n=2; (4. 16)
S3 + 2w0S2 + 2w02S + w03 при n=2;
Такой форме левой части характеристического уравнения САР соответствуют корни, расположенные на полуокружности радиуса w0 в левой полуплоскости S. Переходная характеристика системы в этом случае имеет слабоколебательный характер и меньшее время регулирования по сравнению с САР, характеристическое уравнение которой имеет биномиальную форму.
Разрешим уравнение (4. 12) в области изображений по Лапласу, то есть

Здесь W0(S)=  - матричная передаточная функция объекта, которую после нахождения обратной матрицы и перемножения с матрицей В можно представить в виде:
- матричная передаточная функция объекта, которую после нахождения обратной матрицы и перемножения с матрицей В можно представить в виде:
 , (4. 17)
, (4. 17)
где D(S) – матрица-столбец, а F(S)=det(SIM-A) – характеристический полином объекта управления.
Структурная схема замкнутой САР с регулятором (4. 13) приведена на рис. 6. 1. Характеристическое уравнение этой системы
| W0(S) |
| -P |
| U(S) |

|
| Рис 6. 1 |
Если теперь левую часть уравнения (4. 18) приравнять желаемой стандартной форме H(S), то получим, что
|
|
|
PD(S) = H(S) – F(S) (4. 19)
Следовательно, компоненты матрицы-строки Р можно найти путем приравнивания коэффициентов при одинаковых степенях S в левой и правой части уравнения (4. 19).
Пример: пусть ОУ имеет передаточную функцию
 .
.
Необходимо на основе модального управления синтезировать САР с характеристическим полиномом в виде биномиальной формы.
Решение: введем переменные состояния:
x1 = y, 
и преобразуем исходную W0(S) к виду (4. 17), то есть
 .
.
Биномиальная стандартная форма для САР второго порядка имеет вид:
H(S) = S2 + 2w0S + w02.
Тогда соотношение (4. 19) примет вид:
 .
.
>
| x1 = y |
| + |
|

|

|

|
| - |
| - |
| u |
| x2 |
| Рисунок 6. 2 |
 ,
,  ,
,
Причем
u = - (P1X1 + P2X2).
Структурная схема синтезированной САР приведена на рис. 6. 2.
|
|
|
