 |


Электроприводы с двигателями постоянного
|
|
|
|
Тока поcледовательного возбуждения
Особенности работы ДПТ ПВ
Двигатели постоянного тока последовательного возбуждения широко применяют на электротранспорте, в приводе подъемно-транспортных механизмов. Необходимо отметить, что такие двигатели применяют в качестве стартеров для двигателей внутреннего сгорания. Двигатели последовательного возбуждения надежны по сравнению с другими машинами постоянного тока, так как они имеют обмотку возбуждения, выполненную проводом большого сечения, и с малыми напряжениями между витками. Схема включения в сеть приведена на рис.3.1, откуда видно, что ток возбуждения равен току якоря, который зависит от нагрузки двигателя. Во время работы ток якоря изменяется от холостого хода до номинального значения ( и более), следовательно, изменяется и поток возбуждения.
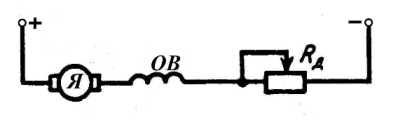
Рис. 3.1. Схема включения ДПТ ПВ: ОВ – обмотка возбуждения;
Я – обмотка якоря.
Вследствие этого невозможно дать аналитические выражения механической и электромеханической характеристик для конкретного двигателя, по которым можно было бы построить их графики. Для анализа механической характеристики машины постоянного тока последовательного возбуждения реальный график намагничивания заменяют идеализированным - ломаным, линейным (рис.3.2).
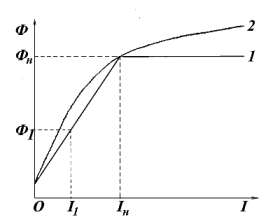
Рис. 3.2. Кривые намагничивания машин постоянного тока
последовательного возбуждения: 1 – идеализированная характери
стика; 2 – реальная характеристика.
Предположим, что двигатель работает на идеализированной характеристике (а) с нагрузкой  , меньшей
, меньшей  (система не насыщена). Так как эта часть характеристики линейна, то
(система не насыщена). Так как эта часть характеристики линейна, то
Ф = кI, (3.1)
где к – коэффициент пропорциональности, к = Ф /Iн.
Электромагнитный момент:
М = сФI = скI. (3.2)
Уравнение ЭДС:
 . (3.3)
. (3.3)
где R - сопротивление якорной цепи.
Из выражения (3.3) определяем электромеханическую
|
|
|
характеристику:
 (3.4)
(3.4)
Из уравнения электромагнитного момента определим значение тока и подставим его в выражение электромеханической характеристики:
 (3.5)
(3.5)
Зависимость между моментом и частотой вращения при насыщенной магнитной системе имеет гиперболический характер. Это справедливо для малонагруженных электрических двигателей, ток которых меньше номинального. При токе больше номинального наступает насыщение, поток двигателя не изменяется и механическая характеристика практически становится линейной. На холостом ходу остаточный поток равен (0,02…0,09)Ф, следовательно, и характеристика а этой части становится близкой к линейной. Таким образом, характеристику двигателя постоянного тока можно разделить на три участка: 1, II, III (рис.3.3).
Нижний участок характеристики – 1 от  = 0 до
= 0 до  линейный и соответствует насыщению магнитной цепи машины (Ф = const).
линейный и соответствует насыщению магнитной цепи машины (Ф = const).
Средний – П - соответствует гиперболической зависимости момента от частоты вращения, для которой ось ординат является
асимптотой.
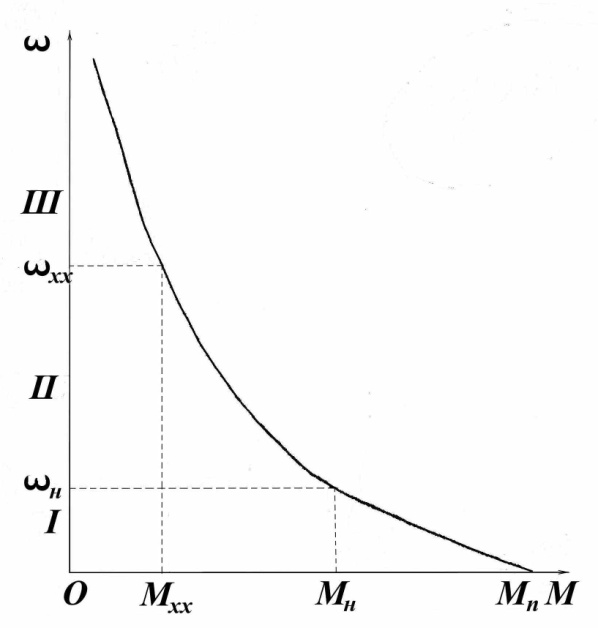
Рис. 3.3. Механическая характеристика двигателя последовательного
возбуждения.
Верхний - Ш участок имеет почти линейный характер и соответствует остаточному магнитному потоку. Особенностью механической характеристики двигателя последовательного возбуждения является ее большая крутизна в области малых значений момента.
Значительное увеличение частоты вращения при малых нагрузках обусловливается соответствующим уменьшением магнитного потока.
Уравнение (3.5) дает лишь общее представление о механической характеристике двигателя последовательного возбуждения. При расчетах этим уравнением пользоваться нельзя, так как машин с ненасыщенной магнитной системой обычно в современной практике не строят. Вследствие того, что реальные механические характеристики сильно отличаются от кривой, выраженной уравнением (3.5), построение характеристик приходится выполнять графо-
|
|
|
аналитическими способами.
|
|
|
