 |


Выбор мощности электродвигателей для кратковременного режима работы S2.
|
|
|
|
 ЭД для длительного реж. S1, при работе кратковременно не будет полностью использован в тепловом отношении (рис.7.19). Для полного использования необходимо, чтобы к концу раб. периода tкр превышение тем-ры достигло tдоп. Т.е. нагружаем ЭД большим Мкр , что увелич. потери мощности DРкр. Коэффициент тепловой перегрузки:
ЭД для длительного реж. S1, при работе кратковременно не будет полностью использован в тепловом отношении (рис.7.19). Для полного использования необходимо, чтобы к концу раб. периода tкр превышение тем-ры достигло tдоп. Т.е. нагружаем ЭД большим Мкр , что увелич. потери мощности DРкр. Коэффициент тепловой перегрузки: 
Допуст. превышение температуры для длительного режима работы (кривая 1):  (А-коэф. теплоотдачи). Для кратковр. реж. (кривая. 2):
(А-коэф. теплоотдачи). Для кратковр. реж. (кривая. 2):  . Приравнивая, получим коэффициент тепловой перегрузки:
. Приравнивая, получим коэффициент тепловой перегрузки: 
Время, в теч. кот. ЭД, работая с заданным значением рт, достигает допустимой температуры перегрева tдоп:  . Коэффициент механической перегрузки рмх:
. Коэффициент механической перегрузки рмх:  . Рассм. потери мощности как сумму постоянных и переменных потерь, тогда коэфф. тепловой перегрузки:
. Рассм. потери мощности как сумму постоянных и переменных потерь, тогда коэфф. тепловой перегрузки:
 тогда:
тогда:  где
где 
 На рис.7.20 показаны зависимости рт и рмх от tкр/Тн. В кратковр-м реж. ЭД может работать с большим коэфф. тепловой перегрузки. Электромех. свойства ЭД обычного исполнения не позволяют полностью использовать ЭД по нагреву; различные части ЭД нагреваются с различными скоростями, ЭД будет иметь меньший к.п.д.
На рис.7.20 показаны зависимости рт и рмх от tкр/Тн. В кратковр-м реж. ЭД может работать с большим коэфф. тепловой перегрузки. Электромех. свойства ЭД обычного исполнения не позволяют полностью использовать ЭД по нагреву; различные части ЭД нагреваются с различными скоростями, ЭД будет иметь меньший к.п.д.
 Выбор ЭД для кратковременного режима из серии машин, предназначенных для длительного режима. Заданными являются нагрузочная диаграмма механизма и время работы tкр.
Выбор ЭД для кратковременного режима из серии машин, предназначенных для длительного режима. Заданными являются нагрузочная диаграмма механизма и время работы tкр.
1)Выбир. ЭД по условиям допуст.перегрузки lm, расч. момент:  ;
;
расчетную мощность:  а затем номин. мощность:
а затем номин. мощность: 
2)Для выбранного двигателя определяют коэффициент потерь 
3)Рассчитывается нагрузочная диаграмма электропривода: М(t) и I(t). И определяются эквивалентные по нагреву момент Мэ и ток Iэ за время tкр.
4)Рассчитывается момент, который может развивать данный двигатель, не перегреваясь, в течении времени tкр: 
|
|
|
5)Проверяются условия:  ,где Мп, Мс.п. –пусковой и статический момент при пуске. Если условия выполняются, то ЭД выбран правильно.При tкр/Тн <0,1 ЭД выбирают по перегрузочной способности и проверяют по пусковому моменту.
,где Мп, Мс.п. –пусковой и статический момент при пуске. Если условия выполняются, то ЭД выбран правильно.При tкр/Тн <0,1 ЭД выбирают по перегрузочной способности и проверяют по пусковому моменту.
Выбор ЭД для режима S2 из серии специальных машин. Мощность ЭД определяется по перегрузочной способности(п.1), рассч-я нагрузочная диаграмма ЭП. Эквивалентный момент (ток) приводят к стандартному времени:

ЭД соответствует условиям нагрева, если  .
.
ЭД проверяется по перегрузочной способности:  и условиям пуска
и условиям пуска  ,где lп – кратность пускового момента, Мном(tкр.ст) – ном. момент для tкр.ст =10, 30, 60, 90 мин. При tкр/Тн £0,1 выборают по перегр.сп-ти с послед. проверкой по условиям пуска. Для кратковр.о режима работы можно выбир. ЭД повт.-кратковр. реж. в соответствии с табл.:
,где lп – кратность пускового момента, Мном(tкр.ст) – ном. момент для tкр.ст =10, 30, 60, 90 мин. При tкр/Тн £0,1 выборают по перегр.сп-ти с послед. проверкой по условиям пуска. Для кратковр.о режима работы можно выбир. ЭД повт.-кратковр. реж. в соответствии с табл.:
| ПВ, % | |||||
25.Выбор мощности электродвигателей для повторно-кратковременного режима работы (S3-S5).
Если ЭД длительного реж. раб. будут работать с ном. нагрузкой в повт.-кратковр. режиме, то его темп-ра не достигнет уст-ся знач., ЭД не будет полностью использован по нагреву. Для полного использования ЭД его можно доп-но нагрузить, но будет низкий к.п.д., меньшая мех. и электрич. перегруз. СП-ть. Поэтому для повт.-кратковр.о реж. прим. ЭД спец. серий: для пост. тока – 2Д, ДП; для переем. - 4АС, 4МТ, 4МТК. Если продолжительность цикла >10 мин., то режим считается длительным с переем. нагр-ой. При ПВ>70% ЭД можно выбирать как для длит-го режима с перемен. нагр., а при ПВ<15% - как для кратковр. режима. Если реальный график нагрузки отлич. от стандартного (рис.7.23), то продолжительность вкл-я равна:  Реальный ток (или момент) в течении рабочего периода заменяется эквивалентным:
Реальный ток (или момент) в течении рабочего периода заменяется эквивалентным:  где n – число участков раб. периода tр, bох(wi) - коэфф. ухудшения охлаждения. Ток (момент) приводится к стандартному знач. eст , исходя из эквивалентности энергии, идущей на нагрев двигателя:
где n – число участков раб. периода tр, bох(wi) - коэфф. ухудшения охлаждения. Ток (момент) приводится к стандартному знач. eст , исходя из эквивалентности энергии, идущей на нагрев двигателя:  где
где 
 . Коэффициент загрузки:
. Коэффициент загрузки:  ;
; 
|
|
|
Если принять а=0, то:  .Усл. проверки ЭД по нагреву:
.Усл. проверки ЭД по нагреву:  .ЭД будет удовл. перегр.сп-ти, если
.ЭД будет удовл. перегр.сп-ти, если  Порядок выбора ЭД: 1)по нагруз.диагр.мех-ма рассч-ют реальное значение e, статическую мощность и предварительно выбирают двигатель; 2)рассч. перех. проц. и строят нагруз. диагр. ЭП за цикл; 3)рассч экв-ое знач. тока (М) за раб. период и приводят его у ст-му знач. eст. 4)пров. ЭД по нагреву и перегрузочной способности.
Порядок выбора ЭД: 1)по нагруз.диагр.мех-ма рассч-ют реальное значение e, статическую мощность и предварительно выбирают двигатель; 2)рассч. перех. проц. и строят нагруз. диагр. ЭП за цикл; 3)рассч экв-ое знач. тока (М) за раб. период и приводят его у ст-му знач. eст. 4)пров. ЭД по нагреву и перегрузочной способности.
26 ДОПУСТИМОЕ ЧИСЛО ВКЛЮЧЕНИЙ В ЧАС АСИНХРОННЫХ КОРОТКОЗАМКНУТЫХ ДВИГАТЕЛЕЙ.
В установившемся режиме двигатель отдает в окружающую среду мощность потерь DРном, а в период пауз - bоDРном. В период пуска и торможения в окружающую среду рассеивается мощность aDРном. Чтобы асинхронный короткозамкнутый двигатель не перегревался необходимо, чтобы выделяемые за время цикла потери энергии были равны энергии, отдаваемой в окружающую среду. Это позволяет составить уравнения теплового равновесия за цикл: 
где DАп+DАт - потери энергии в двигателе за время пуска и торможения;
DА=DРtу - потери энергии за время установившегося движения;
tп ,tт – время пуска и торможения; tо – время паузы; tу – время установившегося движения.

Время установившегося движения 
 Время паузы
Время паузы

Обозначим 
тогда преобразуется к виду 
из которого находим время цикла 
Величина 
поэтому ей часто пренебрегают, принимая Dа=0. Время цикла tц и число включений в час Z связаны соотношением 
Определяем допустимое число включений в час асинхронного двигателя с короткозамкнутым ротором 
При номинальной нагрузке 

Возможно следующие случаи:
а)  , тогда
, тогда 
независимо от продолжительности включения e;
б)  ,
,
тогда с увеличением e число включений Z тоже увеличивается;
в)  ,
,
в этом случае с ростом e число включений Z уменьшается.
27. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ ПРИ УДАРНОЙ НАГРУЗКЕ ЭЛЕКТРОПРИВОДА.
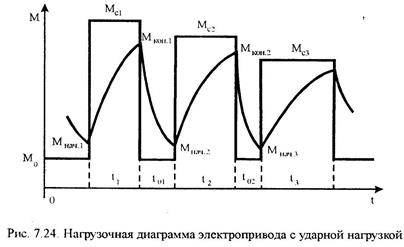 К электроприводам с резко переменной (ударной) нагрузкой относятся приводы молотов, прессов, прокатных станов, ножниц, имеющих нагрузочную диаграмму, близкую к режиму S6 (рис.7.24).
К электроприводам с резко переменной (ударной) нагрузкой относятся приводы молотов, прессов, прокатных станов, ножниц, имеющих нагрузочную диаграмму, близкую к режиму S6 (рис.7.24).
Момент электродвигателя на i-м участке приложения нагрузки

где Мci, Мнач.i - статический и начальный момент на i-м участке нагрузки длительностью ti,
|
|
|
Тм - электромеханическая постоянная времени электропривода.
На j-м участке пауз момент электродвигателя определяется выражением 
где Мо, Мнач.j - момент холостого хода и начальный момент на j-м участке пауз длительностью tj.
Вследствие непрерывности кривой момента имеем

При выборе электродвигателя необходимо обеспечить, чтобы в конце наиболее тяжелого участка максимальный момент двигателя не превышал допустимого lmМном. Наиболее тяжелый участок нагрузочной диаграммы можно определить по максимуму избыточной мощности 
Для выбранного таким образом наиболее тяжелого участка нагрузки принимаем допущение, что Мнач.i =Мо . В конце наиболее тяжелого участка будем иметь уравнение для электромагнитного момента: 
Находим электромеханическую постоянную времени электропривода Тм:
 где sном,х - скольжение на искусственной характеристике при номинальном моменте Мном, wо - угловая скорость идеального холостого хода электродвигателя,
где sном,х - скольжение на искусственной характеристике при номинальном моменте Мном, wо - угловая скорость идеального холостого хода электродвигателя,



где Jд , Jм - соответственно момент инерции ротора электродвигателя с передаточным механизмом и момент инерции механизма, j – передаточное число.
Рассчитанная по величина Тм может быть обеспечена за счет момента инерции электропривода J или за счет необходимой величины sном,х. Требуемое значение момента инерции электропривода обычно обеспечивается за счет установки маховика с моментом инерции
 (7.188)
(7.188)
где dJд , Jм - соответственно момент инерции ротора электродвигателя с передаточным механизмом и момент инерции механизма,
j – передаточное число.
Установка маховика увеличивает капитальные затраты и эксплуатационные расходы, связанные с потерями энергии при вращении маховика. Поэтому стремятся получить необходимую величину Тм за счет соответствующей величины скольжения sном,х. Но при этом снижается средняя скорость двигателя и, соответственно, производительность механизма. В связи с этим наибольшую величину sном,х ограничивают значением

При рассмотренном подходе к выбору величины Тм мощность двигателя определяется эквивалентным моментом, который рассчитывается по нагрузочной диаграмме электропривода.
|
|
|
28. РЕГУЛИРОВАНИЕ КООРДИНАТ ЭЛЕКТРОПРИВОДА: ОСНОВНЫЕ СВЕДЕНИЯ, ПОАКАЗАТЕЛИ РЕГУЛИРУЕМОГО ЭП. ДОПУСТИМЫЙ МОМЕНТ ДПТ-НВ И АД ПРИ ДВУХЗОННОМ РЕГУЛИРОВАНИИ СКОРОСТИ.
Для управления движ-ем необходимо регулировать переменныеЭП, которые в пространстве состояний называются фазовыми координатами. Поэтому говорят о регулировании координат электропривода. Наиболее характерными регулируемыми координатами Э.П
являются скорость, момент(ток) и положение.
Известны два способа автоматического регулирования координат:
1)Регулирование по отклонению координаты от заданного значения с помощью отрицательной обратной связи по регулируемой величине
2)Регулирование по возмущению, где с помощью положительной обратной связи компенсируется влияние возмущения на регулируемую величину
Иногда применяется комбинированное управление.
Для оценки свойств регулируемого электропривода вводится ряд показателей: точность, диапазон, плавность, динамические показатели, технико-экономич. показатели, допустимая нагрузка.
 Точность регулирования оценивается отношением наибольшего отклонения DХmax регулируемой величины к ее среднему значению Хср при данном изменении возмущения F (рис.8.1).
Точность регулирования оценивается отношением наибольшего отклонения DХmax регулируемой величины к ее среднему значению Хср при данном изменении возмущения F (рис.8.1).
Для замкнутых систем регулирования точность оценивается как отношение абсолютной величины разности между заданным Хз и текущим Х значениями регулируемой величины к ее заданному значению:

 В разомкнутых и замкнутых системах точность регулирования не должна быть ниже допустимого значения, т.е.
В разомкнутых и замкнутых системах точность регулирования не должна быть ниже допустимого значения, т.е.


в данном диапазоне возмущений (рис.8.2). Верхний предел регулируемой переменной Х ограничивается допустимыми значениями, а нижний – чаще всего, допустимой точностью регулирования.
Плавность регулирования характеризуется числом дискретных значений регулируемой величины в заданном диапазоне и оценивается коэффициентом плавности 
Динамические показатели:
а) быстродействие определяет быстроту реакцию электропривода на управляющее воздействие. Быстродействие оценивается по времени пуска и торможении электропривода;
б) время регулирования tр – это время, за которое регулируемая величина Х первый раз достигает установившегося значения Хуст (характерные временные интервалы: tр , tmax, tп.п.) – рис.8.3. Другие временные показатели: время первого максимума tmax, и время переходного процесса tп.п.;
|
|
|
 в) перерегулирование представляет собой динамическую ошибку и определяется как относительная величина максимального отклонения
в) перерегулирование представляет собой динамическую ошибку и определяется как относительная величина максимального отклонения

г) колебательность оценивается логарифмическим декрементом затухания
 и числом колебаний NS за время переходного процесса
и числом колебаний NS за время переходного процесса 
Технико-экономичпоказ. Определяются капитальными затратами на приобретение эл. оборудования для регулир. ЭП и эксплуатационными расходами на эксплуатацию ЭП, а так же влиянием регулируемого ЭП на питающую сеть и окружающую среду.
В целях наглядности дальнейшего рассмотрения возьмем ДПТ НВ, для которого
 (8.8)
(8.8)
где Iя – ток якоря;
Ф – магнитный поток;
К – конструктивная постоянная двигателя.
Если магнитный поток Ф=Фном, то на всем диапазоне регулирования скорости при независимом охлаждении двигатель может обеспечивать допустимый момент, равный номинальному
 (8.9)
(8.9)
Допустимая по условиям нагрева мощность
 (8.10)
(8.10)
будет пропорциональна скорости w.
Если магнитный поток изменяется, например, ослабляется (Ф<Фном), то допустимый по условиям нагрева момент уменьшается. Определим магнитный поток из приближенного равенства:
 (8.11)
(8.11)
откуда
 (8.12)
(8.12)
Подставим (8.12) в (8.8):
 (8.13)
(8.13)
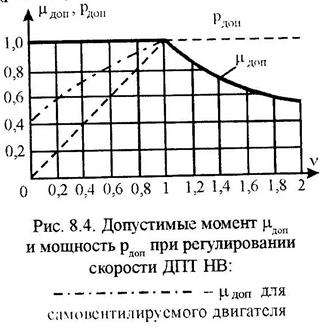
Следовательно, при w>wном (Ф<Фном) допустимый по условиям нагрева момент изменяется обратно пропорционально скорости, а допустимая по условиям нагрева мощность
будет равна номинальной мощности (рис.8.4).
Следует заметить, что аналогичные выводы можно сделать и для асинхронного двигателя (АД), где магнитный поток может быть постоянным или ослабляться с увеличением скорости.
Допустимый по условиям нагрева момент регулируемого самовентилируемого электродвигателя рассчитывается, исходя из уравнения теплового равновесия для данной угловой скорости w:
 (8.13)
(8.13)
где
 (8.14)
(8.14)
 (8.15)
(8.15)
 (8.16)
(8.16)
А(w=0) – теплоотдача при скорости ротора w=0,
А(w=wном) – тоже при w=wном .
Иногда в уравнение теплового равновесия (8.13) включают только так называемые “греющие потери”, исключая механические и добавочные потери, которые нагревают в основном не обмотки, а другие детали электродвигателя. В этом случае уравнение теплового равновесия записывается в виде:
 (8.17)
(8.17)
где
 (8.18)
(8.18)
DРст – потери в стали.
Для линейной механической характеристики с модулем жесткости b
 (8.19)
(8.19)
где N=1 – для ДПТ НВ,
 - для АД.
- для АД.
Если допустимый момент электродвигателя для любой скорости соответствует статическому моменту, то это означает полное использование номинальной мощности двигателя. К сожалению, это не всегда возможно, так как электродвигателя, как было показано выше, при независимой вентиляции может работать или с постоянным допустимым моментом или с постоянной допустимой мощностью, в то время как статические моменты имеют большое разнообразие (см. главу 1 “Механика электропривода”). Это является причиной завышения габаритной мощности электродвигателя при регулировании скорости. Завышение габаритной мощности можно представить в виде
 (8.20)
(8.20)
|
|
|
