 |


Потери мощности в установившихся режимах работы нерегулируемых и регулируемых электроприводов
|
|
|
|
Потери мощности в нерегулируемом электроприводе складываются из потерь мощности в электродвигателе  и в механической передаче
и в механической передаче  :
: 
Потери мощности в ЭД разделяют на постоянные  и переменные
и переменные  :
:  Под постоянными понимаются потери мощности, независящие от нагрузки. К ним относятся: 1) потери в стали, 2) механические потери, 3) вентиляционные потери, 4) потери на возбуждение электродвигателей.
Под постоянными понимаются потери мощности, независящие от нагрузки. К ним относятся: 1) потери в стали, 2) механические потери, 3) вентиляционные потери, 4) потери на возбуждение электродвигателей.
Под переменными потерями  понимают потери мощности, зависящие от нагрузки, т. е. потери в проводниках обмоток, по которым протекает ток нагрузки.
понимают потери мощности, зависящие от нагрузки, т. е. потери в проводниках обмоток, по которым протекает ток нагрузки.
Для двигателей постоянного тока  , (6.4) где
, (6.4) где  ,
,
Для асинхронных трехфазных двигателей (АД)  .
.
При небольшом диапазоне изменения токов АД, когда намагничивающий ток  примерно постоянный, можно принять:
примерно постоянный, можно принять: 
Тогда переменные потери в трехфазной обмотке статора: 
Составляющую потерь  можно отнести к постоянным потерям (потери на возбуждение), а переменные потери АД выразить только через ток ротора
можно отнести к постоянным потерям (потери на возбуждение), а переменные потери АД выразить только через ток ротора
 ,(6.9)где
,(6.9)где  (6.10)
(6.10)
Для трехфазных синхронных двигателей (СД):
 ,(6.11) где
,(6.11) где  (6.12)
(6.12)

Переменные потери для любого электродвигателя можно записать в общем виде

Суммарные потери мощности в электродвигателе  Обозначим
Обозначим  как коэффициент потерь, который зависит от номинальной мощности, номинальной скорости и конструкции электродвигателя и в общем случае находится в пределах 0,5¸2, тогда с учетом (6.16) суммарные потери мощности в электродвигателе запишем в виде
как коэффициент потерь, который зависит от номинальной мощности, номинальной скорости и конструкции электродвигателя и в общем случае находится в пределах 0,5¸2, тогда с учетом (6.16) суммарные потери мощности в электродвигателе запишем в виде
 (6.17)
(6.17)
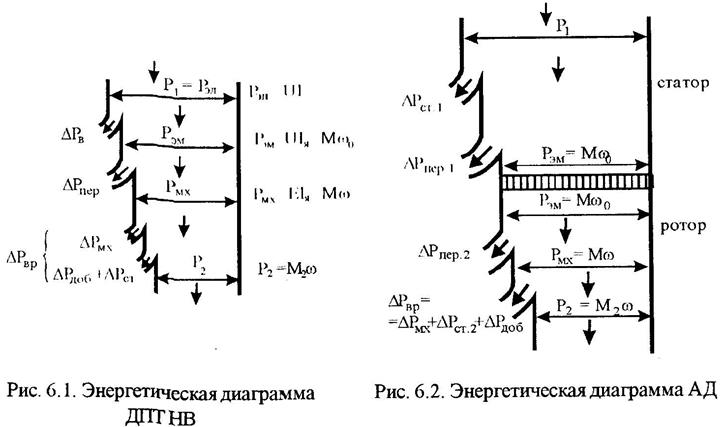 Для наглядного представления потерь мощности приведем энергетические диаграммы ДПТ НВ (рис.6.1) и АД (рис.6.2).
Для наглядного представления потерь мощности приведем энергетические диаграммы ДПТ НВ (рис.6.1) и АД (рис.6.2).
Механические характеристики ДПТ НВ и АД в пределах рабочей зоны в установившемся режиме можно считать линейными Как можно видеть из энергетических диаграмм ДПТ НВ и АД и рис.6.3, переменные потери в якоре ДПТ НВ и в роторе
|
|
|
 (6.18)где
(6.18)где  (6.19)
(6.19)  (6.20) Суммарные переменные потери для АД
(6.20) Суммарные переменные потери для АД  , где
, где  Переменные потери мощности в электродвигателях с линейной механической характеристикой пропорциональны скольжению.
Переменные потери мощности в электродвигателях с линейной механической характеристикой пропорциональны скольжению.
Колебания скорости и момента приводят к увеличению потерь мощности.
Для регулируемых электроприводов постоянного тока постоянные потери мощности представляют в таком виде: 
где DРв.ном – номинальные потери мощности на возбуждение,
m – показатель, характеризующий кривую намагничивания, 1<m<2.
Переменные потери в регулируемых электроприводах постоянного тока выражаются прежней формулой  , в регулируемых электроприводах постоянного тока к потерям в электродвигателе DРд добавляются потери мощности в преобразователе DРпр, которые тоже разделяют на постоянные (потери в стали силовых трансформаторов и реакторов) DРпост.пр и переменные (потери в обмотках трансформаторов, дросселей и вентилях) DРпер.пр:
, в регулируемых электроприводах постоянного тока к потерям в электродвигателе DРд добавляются потери мощности в преобразователе DРпр, которые тоже разделяют на постоянные (потери в стали силовых трансформаторов и реакторов) DРпост.пр и переменные (потери в обмотках трансформаторов, дросселей и вентилях) DРпер.пр:

где  – номинальные потери в вентилях преобразователя,
– номинальные потери в вентилях преобразователя,  – потери короткого замыкания в трансформаторе,
– потери короткого замыкания в трансформаторе,  – потери в дросселях,
– потери в дросселях,  – коэффициент загрузки.
– коэффициент загрузки.
Постоянные потери мощности в регулируемом асинхронном двигателе включают потери в стали статора DРст.1, потери в стали ротора DРст.2, потери в обмотке статора от протекания намагничивающего тока DРm и механические потери DРмх:  В свою очередь механические потери принимают пропорциональными квадрату скорости
В свою очередь механические потери принимают пропорциональными квадрату скорости  из-за преобладающего влияния вентиляционных потерь.
из-за преобладающего влияния вентиляционных потерь.
Потери в стали статора АД можно записать в виде  ,
,

Потери от протекания намагничивающего тока Im по обмотке статора можно выразить таким образом:  , (6.35)где
, (6.35)где  ,
,
Как будут изменяться составляющие постоянных потерь регулируемого АД, будет зависеть от способа регулирования.
|
|
|
При реостатном способе регулирования АД имеем:  ,
,
поэтому постоянные потери 
остаются примерно постоянными.
При частичном управлении АД по одному из законов стабилизации потокосцеплений (статора, взаимоиндукции или ротора) магнитный поток Ф»Фном, а абсолютное скольжение sа обычно поддерживается на низком уровне, что позволяет пренебречь потерями в стали ротора и считать скорость пропорциональной частоте. В результате, при частотном управлении АД по закону Ф=const постоянные потери 
Переменные потери мощности при частотном управлении АД определяются выражениями (6.21) – (6.22):  , (6.39) где
, (6.39) где 
 .
. 
 тогда
тогда 
Следовательно, при частотном регулировании скорости АД с постоянным статическим моментом и постоянным магнитным потоком (конгруэнтные механические характеристики) переменные потери мощности в статоре и роторе остаются неизменными.
 , (6.43)
, (6.43)
где  – приведенное суммарное активное сопротивление фазы ротора.
– приведенное суммарное активное сопротивление фазы ротора. 
где sе – скольжение на естественной механической характеристике АД при данном электромагнитном моменте М,  – приведенное собственное активное сопротивление фазы ротора.
– приведенное собственное активное сопротивление фазы ротора.
Подставив в (6.44) в (6.43), получим  ,
,
т.е. переменные потери в обмотке статора АД при реостатном регулировании и неизменном моменте на валу являются постоянными, независящими от скорости. Переменные же потери в роторе АД при постоянном моменте  ,
,
будут пропорциональные скольжению, т.е. будут увеличиваться со снижением скорости.
|
|
|
