 |


Назначение УСАВП, основные функции и общий принцип работы
|
|
|
|
Учебный вопрос № 1
Назначение УСАВП, основные функции и общий принцип работы
Универсальные системы автоматического ведения поезда (автоведение)
предназначены для автоматизированного управления подвижным составом с соблюдением норм безопасности движения в соответствии с заданным временем хода (или графиком) на основе выбора энергетически рационального режима движения.
Системы автоведения относятся к автономным системам, т. е. свое местонахождение и требуемые режимы движения система определяет самостоятельно.
Системы автоведения облегчают труд машиниста, способствуют
повышению производительности труда, позволяют экономно расходовать электроэнергию и вести учёт ее расхода.
Повышается безопасность движения за счёт автоматического исполнения скоростного режима движения по сигналам светофоров с учётом постоянных и временных ограничений скорости, а также за счет уменьшения утомляемости машиниста. Система контролирует правильность работы функциональных узлов аппаратуры, осуществляя при этом функцию самодиагностики.
Системы автоведения выполняют следующие функции:
определяют фактические параметры движения поезда и выводят их на экран дисплея;
ведут расчет рекомендуемых параметров движения поезда и управляющих воздействий в реальном времени;
управляют тягой и торможением;
осуществляют визуальный и звуковой диалог с машинистом;
производят запись регистрируемых параметров на картридж (через
подсистему РПДА);
проводят тестирование аппаратуры автоведения и тягового подвижного состава и осуществляют контроль исправности аппаратуры.
Система автоведения обеспечивает поддержание заданной скорости и
|
|
|
непрерывно рассчитывает её оптимальное значение в условиях меняющейся поездной обстановки, обеспечивая минимальный расход топлива или электроэнергии и жестко соблюдая расписание (для пассажирского движения) или перегонное время хода (для грузового движения).
Системы автоведения могут работать в следующих режимах: 1. Режим автоведения – система автоведения берет на себя полное управление поездом, используя органы управления локомотивом. 2. Режим советчика – управление производится машинистом. 3. Режим кнопочного контроллера – управление поездом осуществляется машинистом через клавиатуру системы автоведения.
Во всех режимах система автоведения выводит на экран рекомендации по энергооптимальному ведению поезда и отображает текущую информацию о состоянии ведения.
Интеллектуальный центр системы автоведения (Блок БС «Аппаратура систем автоведения») – это компьютер с программой, которая моделирует поведение поезда, используя необходимую информацию, умеет им управлять и знает регламент ведения.
Для моделирования программа автоведения использует данные: о текущем состоянии тягового подвижного состава – поступает с подвижного состава от датчиков; о составе (его масса, длина, количество вагонов и т. п. ) – вводится автоматически или вручную перед началом работы; о маршруте следования – содержится в Базе данных маршрутов; об ограничениях скорости.
Программа автоведения постоянно следит за меняющейся поездной обстановкой и выдает управляющие команды аппаратуре на тягу, торможение, подачу песка и т. д., ориентируясь на оптимальный расход топлива или электроэнергии.
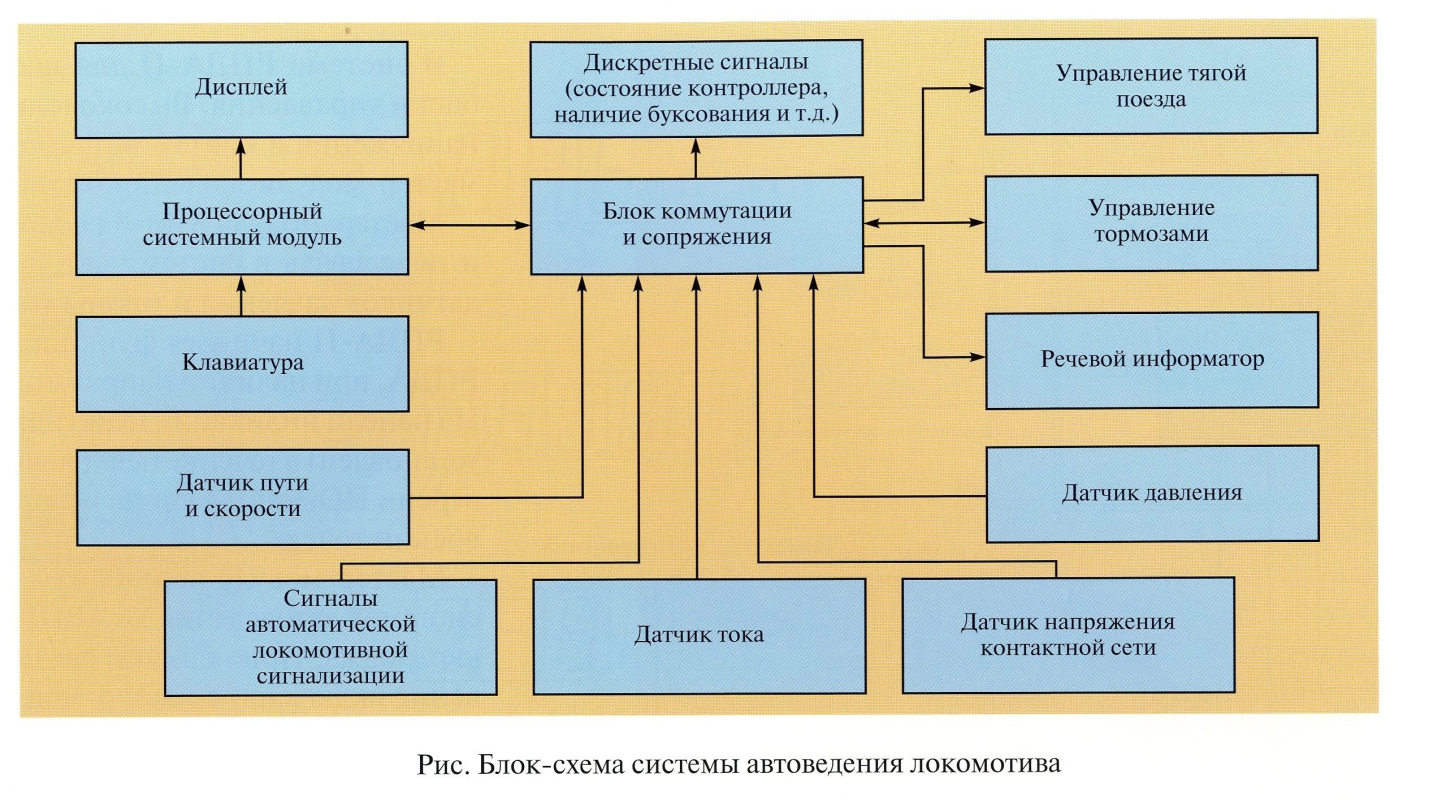
Рисунок 11. 1. Блок-схема системы автоведения локомотива

Рисунок 11. 2. Структура управляющей программы автоведения
Учебный вопрос № 2
Состав системы УСВАП
Аппаратура систем автоведения строится на основе блоков, осуществляющих управление подвижным составом (тяга, торможение, рекуперация), датчиков, фиксирующих ключевые показатели функционирования локомотива или моторного вагона, и управляющего компьютера.
|
|
|
Блоки систем автоведения объединяются в одну общую CAN-сеть. Эта сеть позволяет согласовать друг с другом разнотипные устройства, предназначенные для организации распределенной обработки данных и
подключать новые блоки. CAN-сеть не чувствительна к электромагнитным помехам и обладает высокой степенью надежности. При этом любое из подключенных устройств может быть использовано для передачи или получения информации. Полученные от систем локомотива аналоговые и дискретные сигналы обрабатываются, поступают в сеть и становятся доступными другим блокам системы.
Основное устройство, которое несет в себе всю информацию о сети и координирует работу подключаемых модулей – Системный Блок (БС), который представляет собой высокопроизводительный компьютер. Блок БС, исходя из полученных сообщений от устройств в CAN-сети, формирует команды на управление. Также в блоке БС содержится программа автоведения.
Аппаратура системы подключается к электрическим цепям управления тепловоза в ВВК, в кабине машиниста №1 и в кабине машиниста №2, в соответствии со схемой электрической принципиальной. Подключение к пневмооборудованию тепловоза производится в соответствии со схемой пневматической принципиальной.
 Электромагнитные клапаны и пневмомодули предназначены для дистанционного автоматизированного управления электропневматическими и пневматическими тормозами поезда и образуют тормозную подсистему. Датчики давления (ДД) предназначены для измерения и передачи в систему текущих значений давлений в уравнительных резервуарах (УР), питательной магистрали (ПМ), в тормозных цилиндрах поезда (ЗТС), тормозной магистрали (ТМ), тормозных цилиндрах тепловоза (ТЦ).
Электромагнитные клапаны и пневмомодули предназначены для дистанционного автоматизированного управления электропневматическими и пневматическими тормозами поезда и образуют тормозную подсистему. Датчики давления (ДД) предназначены для измерения и передачи в систему текущих значений давлений в уравнительных резервуарах (УР), питательной магистрали (ПМ), в тормозных цилиндрах поезда (ЗТС), тормозной магистрали (ТМ), тормозных цилиндрах тепловоза (ТЦ).
Рисунок 11. 3. Структура размещения аппаратуры автоведения

Рисунок 11. 4. Основные блоки УСАВП

Рисунок 11. 5. Блоки вспомогательные и кабельный комплект УСАВП

Рисунок 11. 6. Датчики УСАВП
Бортовая управляющая программа предназначена для реализации алгоритма автоведения, ввода необходимой для автоведения информации, организации взаимодействия с машинистом, сбора и передачи записываемой на картридж информации.
|
|
|
|
|
|
