 |


Принципы измерении и расчетов при параллелометрии
|
|
|
|
ПРИНЦИПЫ ИЗМЕРЕНИИ И РАСЧЕТОВ ПРИ ПАРАЛЛЕЛОМЕТРИИ
\ Большинство авторов: F. Craddock (1956), J. M. Ney (1956), Lee (1964), W. Ebersbach и 1\. Heide (1964) и др. приводят общий перечень задач, решаемых при параллелометрии. По нашему мнению, с целью детального рассмотрения их можно условно разграничить на клинические задачи, которые непосредственно решает врач, и лабораторные, или технические, которыми должен зани-

Рис. 3. Параллелометр НИИЭХАИ Минздрава СССР. 1 — основание; 2 — неподвижная стойка; 3 — подвижная стойка; 4 — фиксирующая зажимная гайка; 5 — горизонтальный кронштейн; 6 — одинарное подвижное плечо; 7 — двойное подвижное плечо; 8 — цанговый зажим для фиксации сменных принадлежностей; 9 — зажимной патрон для фиксации ножа (10) или наконечника бормашины; 11 — направляющая ось с пружиной для вертикального перемещения патрона; 12 — несъемный столик; 13 — вращающаяся площадка для установки гипсовой модели; 14 — винты для фиксации гипсовой модели; 15 — рычаг фиксации угла наклона вращающейся площадки (13); 16 — винт фиксации вращения столика по окружности; 17 —держатель грифеля; 18 — калибры, стержнедержателн для установки замков-фиксаторов протезов и стержень для манипуляций; 19 — съемный стакан для хранения сменных принадлежностей.
маться лаборант или зубной техник. При решении клинических задач целесообразно дифференцировать их в зависимости от вида протеза (съемный или несъемный) и типа конструкции. В настоящей главе мы рассматриваем в основном бюгельные протезы. Задачи, которые решаются с помощью параллелометрии при изготовлении других видов протезов, как и некоторых шинирующих конструкций, изложены в последующих главах.
|
|

|
|

Рис. 4. Параллелометр Ц-5037.
а — укладочный ящик для принадлежностей; б — схема прибора. 1 — основание прибора; 2— вертикальная стойка; 3 — маховик; 4— горизонтальный кронштейн; 5 — цанговый патрон; 6 — гайка, закрепляющая инструменты в цанговом патроне; 7 — винтовой зажим цангового патрона; 8 — сменный инструмент; 9 — съемный столик; 10 — винтовой зажим столика; 11—подставка столика; 12, 13 — парные винты для крепления моделей; 14 — указательный стержень; 15 — графитовый отметчик; 16 — измерительные стержни с головками 0, 25; 0, 5; 0, 75; 17—нож для подрезки воска; 18 — переходная втулка; 19 — кронштейн для фиксации прямого наконечника; 20 — скоба; 21—диск-подставка с тремя коническими выступами.
КЛИНИЧЕСКИЕ ЗАДАЧИ >
1. Определение пути введения протеза.
2. Фиксация избранного пути введения протеза одним
из методов его повторного воспроизведения,
3. Определение линии обзора.
4. Определение точки расположения удерживающего
окончания плеча кламмера.
5. Выбор конструкции протеза и нанесение ее черте
жа на модель.
Определение пути введения протеза. Путем введения Е. М. Гаврилов (1973) называет «движение протеза от первоначального контакта его кламмерных элементов с опорными зубами до тканей протезного ложа, после чего окклюзионные накладки устанавливаются в своих ложах, а базис точно располагается на поверхности протез-
 1 В соответствии с применяемой методикой и конструкцией парал-лелометра, а также способом фиксации конструкции изложенные задачи могут быть изменены или дополнены. Особенности параллело-метрии при изготовлении несъемных протезов приведены в главе V,
1 В соответствии с применяемой методикой и конструкцией парал-лелометра, а также способом фиксации конструкции изложенные задачи могут быть изменены или дополнены. Особенности параллело-метрии при изготовлении несъемных протезов приведены в главе V,
ного ложа». Путь снятия протеза этим автором опреде- ляется как движение в обратном направлении, т. е. от момента отрыва базиса от слизистой оболочки протезного ложа до полной потери контакта опорных и удерживающих элементов с опорными зубами. Чтобы полнее расшифровать эти термины и дать им соответствующее определение, необходимо прежде всего отметить, что понятие «путь введения» — результат специальных измерений и расчетов при параллелометрии и что он определяется до изготовления протеза. Определение должно также отражать общие закономерности этих расчетов, характерные для изготовления всех лечебных конструкций, и универсальность параллелометрии.
|
|
|
В нашем представлении термин «путь введения» — заранее рассчитанная траектория, обеспечивающая беспрепятственное наложение лечебной конструкции на протезное ложе. Соответственно путь выведения — направление, обратное траектории введения, обеспечивающее беспрепятственное снятие лечебной конструкции. Выведение протеза должно совпадать с направлением его введения, поэтому снятие протеза с зубного ряда необходимо выполнять в обратной последовательности. Так, например, если при введении протеза вначале необходимо наложить правую, а затем левую его часть, то при выве-. дении вначале снимают левую, а затем правую часть протеза. Эта взаимозависимость очень важна, так как путь введения и выведения должен быть беспрепятственным и исключать повреждение тканей при каждом наложении и снятии протеза.
Для определения пути введения наиболее известны метод произвольной ориентации модели в параллело-метре и метод определения пути введения по биссектрисе угла наклона осей опорных зубов. Ниже приводятся их описание и оценка, так как в литературе появились Многочисленные критические замечания и сообщения о недостатках, присущих этим методам, и широком применении при параллелометрии так называемого логического метода, или метода наклона модели [Гаври-лов Е. И., 1966, 1973; Копейкин В. Н., 1968, 1977, 1985; Шварц С. Д., 1968, 1972; Щербаков В. А., 1971; Кула-женко В. И., Березовский С. С, 1975; Погодин В. С., Пономарева В. А., 1983, и др. ].
% Метод произвольной ориентации модели в параллелометре. С его помощью модель устанавливают на столике параллелометра на глаз та-
ким образом, чтобы окклюзионная поверхность опорных
зубов была расположена перпендикулярно к стержню
для манипуляций параллелометра. После фиксации по
ложения модели на столике параллелометра заменяют
его стержень и очерчивают линию обзора. Этот метод
применялся ранее при конструировании простых бюгель-
ных протезов с проволочными кламмерами, при наличии
2—3 относительно параллельных между собой опорных
зубов. При использовании этого метода линия обзора в
большинстве случаев занимала крайне невыгодное поло
жение, что затрудняло выбор и расположение кламмеров
с учет< 3м эстетических требований, а также ухудшало
фиксацию конструкции. -~-
|
|
|
*" ■ " М е т о д определен и я нуги в в е д е н и я п о биссектрисе угла наклона опорных зубов. Первоначально метод применялся главным образом при изготовлении различных конструкций мостовидных про-тезов. В основе этого метода, называемого некоторыми авторами методом Кеннеди, была заложена идея о возможности щадящего препарирования опорных зубов при выборе направления введения протеза, соответствующего среднему углу их наклона. Краткие сведения об этом методе, а также иллюстрации угла наклона опорных зубов, разделенного биссектрисой в простейших паралле-лометрах, приводятся в работах многих авторов [Васильев М. Е., Грозовский А. Л., Ильина-Маркосян Л. В., Тиссенбаум М. С, 1940; Weinstein L., 1903; Schroder П., 1925; Kantorovich A., 1929; Laszlo M., Denes Sen., Gjor-gy H., 1950; Bottger H., Haupl K., Kirsten H., 1959]. Однако подробное изложение методики и описание всех этапов определения пути введения в этих публикациях, как правило, отсутствует, чем, по-видимому, объясняется ограниченное использование этого метода при изготовлении различных бюгельных конструкций. В доступной нам литературе мы не нашли также каких-либо сведений о причастности Е. Kennedy к разработке этого метода, кроме его ссылок на J. M. Ney Company (1942), применявшую этот метод. В то же время только G. L. Roth
(1942) подробно описывает эту методику, а также принцип определения пути введения протеза по наиболее наклонным опорным зубам, расположенным во фронтальной и сагиттальной плоскостях.
Тщательное изучение и разработка этого метода, а также создание устройств для параллелометрии проводились также в нашей стране. В результате был разра-
|
|
|

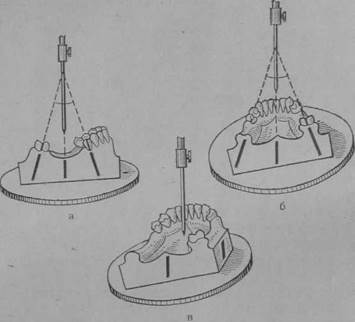
Рис. 5. Метод определения биссектрисы. а — в сагиттальной плоскости; б — в трансверсалыюй; в — путь введения.
ботан описанный выше параллелометр НИИЭХАИ (см. рис. 3) и методика работы с ним. В соответствии с этой методикой определение пути введения протеза производится следующим образом. Рабочую модель челюсти устанавливают на вращающейся площадке 13 столика параллелометра и фиксируют винтами 14. Поворачивают столик, обращая боковую или заднюю поверхность модели к оператору, и фиксируют винтом 16. В цанговом зажиме 8 одинарного подвижного плеча укрепляют стержень для манипуляций, подводят его к одному из опорных зубов и, наклоняя площадку 13, устанавливают стержень параллельно продольной оси коронки зуба. Затем, например, на боковой поверхности модели проводят карандашом линию, которая является продолжением оси коронки зуба. Аналогично поступают и со вторым опорным зубом. Освободив винт фиксации столика 16, поворачивают и наклоняют модель так, чтобы стержень оказался расположенным по биссектрисе угла между парой опорных зубов. Эту линию также наносят на боковую поверхность модели (рис. 5, а). При имеющемся третьем опорном зубе на этой же поверхности модели находят
новую биссектрису угла между ранее найденной для первой пары и осью третьего опорного зуба. При наличии четырех опорных зубов и более на этой поверхности таким же образом находят и проводят следующие линии, соответствующие половине угла между осью последующего опорного зуба и биссектрисой, найденной при предыдущем измерении.
Аналогичным образом находят биссектрисы углов между осями зубов на задней поверхности модели (рис. 5, б). При достаточном навыке в работе направление введения протеза можно определить по биссектрисам углов между осями двух наиболее конвергирующих зубов в сагиттальной и фронтальной плоскостях.
Закончив изучение взаимоположения зубов, площадку с моделью устанавливают так, чтобы стержень параллелометра строго соответствовал линиям биссектрис, найденных при последнем измерении на боковой и задней поверхностях модели (рис. 5, в). В этом положении площадку вместе с моделью фиксируют сильным нажимом на рычаг 15. Затем вместо стержня параллелометра для манипуляций устанавливают в цанговом зажиме 8 грифель параллелометра 17 и наносят линию обзора при положении модели, найденном в процессе определения пути введения, а также решают остальные задачи.
Усовершенствованием этого метода занимались В. Но-вак и другие авторы. Учитывая, что точное определение биссектрисы затруднено, так как угол, образованный проекцией осей непараллельных зубов воображаемый и находится в пространстве над моделью, В. Новак предложил пересекать проекцию этих осей (в пределах стенки модели) двумя параллельными линиями, которые чертят таким образом, чтобы в каждом случае получить часть равнобедренного треугольника. Основание треугольника (параллельно нанесенные линии) легко разделить пополам линией, идущей к его вершине (медианой). Ее направление в равнобедренном треугольнике совпадает с биссектрисой, на поиске которой основан метод определения пути введения протеза. | Метод определения пути введения протеза по Новак у. Метод подробно излагается на примере поиска пути введения бюгельного протеза с опорой
|
|
|
 на зубы 84 | 5. Он включает два этапа. Первый этап проводится без параллелометра. Вначале подготавливают
на зубы 84 | 5. Он включает два этапа. Первый этап проводится без параллелометра. Вначале подготавливают
 боковую и заднюю стенки модели, оформляя их в виде плоскостей, перпендикулярных друг к другу и к основанию модели. Для лучшей ориентации боковую плоскость обозначают цифрой I, заднюю — II. Направление продольной оси каждого опорного зуба устанавливают с помощью отрезков проволоки длиной 20 мм, укрепляемых воском посередине режущего края или в центре жевательной поверхности зуба. Чтобы положение отрезков проволоки соответствовало продольной оси зуба, каждый из них необходимо сориентировать вдоль коронки зуба, глядя на нее поочередно с вестибулярной и оральной сторон. За продольную ось зуба принимается линия, проходящая через середину корня и коронки зуба. Поскольку корень невидим, определение оси каждого из зубов производится только по его коронке. Проекцию этих осей в дальнейшем поочередно наносят вручную карандашом на обе подготовленные ранее плоскости (боковую и заднюю). На рис. 6, а показаны проекции осей
боковую и заднюю стенки модели, оформляя их в виде плоскостей, перпендикулярных друг к другу и к основанию модели. Для лучшей ориентации боковую плоскость обозначают цифрой I, заднюю — II. Направление продольной оси каждого опорного зуба устанавливают с помощью отрезков проволоки длиной 20 мм, укрепляемых воском посередине режущего края или в центре жевательной поверхности зуба. Чтобы положение отрезков проволоки соответствовало продольной оси зуба, каждый из них необходимо сориентировать вдоль коронки зуба, глядя на нее поочередно с вестибулярной и оральной сторон. За продольную ось зуба принимается линия, проходящая через середину корня и коронки зуба. Поскольку корень невидим, определение оси каждого из зубов производится только по его коронке. Проекцию этих осей в дальнейшем поочередно наносят вручную карандашом на обе подготовленные ранее плоскости (боковую и заднюю). На рис. 6, а показаны проекции осей
 двух опорных зубов 841 на боковую поверхность модели, обозначенные как Ai и Bi. Чаще всего получаемые проекции непараллельны между собой и, пересекаясь над моделью, образуют угол. Схема наклона проекций продольных осей зубов и образования угла приведена на рис. 6, б. В. Новак предлагает пересекать их двумя параллельными линиями, которые наносятся таким образом, чтобы углы П были равны между собой. Эти параллельные линии следует наносить как можно дальше друг от друга, чтобы увеличить точность проведения в дальнейшем линии, делящей пополам угол между проекциями осей. Отрезки обеих параллельно идущих линий, заключенные между проекциями осей Ai и Bi, деля/г пополам в точках О и Ох и соединяют последние линией Q, делящей пополам угол между проекцией осей Ai и Bi (рис. 6, в).
двух опорных зубов 841 на боковую поверхность модели, обозначенные как Ai и Bi. Чаще всего получаемые проекции непараллельны между собой и, пересекаясь над моделью, образуют угол. Схема наклона проекций продольных осей зубов и образования угла приведена на рис. 6, б. В. Новак предлагает пересекать их двумя параллельными линиями, которые наносятся таким образом, чтобы углы П были равны между собой. Эти параллельные линии следует наносить как можно дальше друг от друга, чтобы увеличить точность проведения в дальнейшем линии, делящей пополам угол между проекциями осей. Отрезки обеих параллельно идущих линий, заключенные между проекциями осей Ai и Bi, деля/г пополам в точках О и Ох и соединяют последние линией Q, делящей пополам угол между проекцией осей Ai и Bi (рис. 6, в).
Затем на эту же поверхность модели наносят проекцию Di продольной оси зуба | 5. Проводят параллельные линии между направлениями Ci и Di и находят искомую направлений всех трех проекций продольных осей зубов на первой плоскости. Обозначают ее буквой Ет (рис. 6, г). Аналогичным способом поступают и на задней плоскости модели. При этом вначале переносят направ-
ление проекций осей зубов 84|, которые обозначают
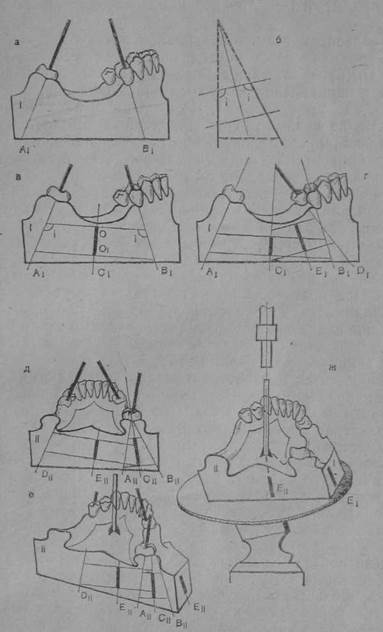
Рис. 6. Метод параллеломе'хрии по Новаку. а - проекция осей в сагиттальной плоскости; б — схема образования равнобедренного треугольника; в'- деление параллельных линий пополам; г-получение результирующей трех проекции; д - получение результирующей на задней? ™°иДеЛИ; е-> '" ан°вка штифта соответственно пут введения; ж - ориентация модели в параллелометре
уже как Аи и Вп. Между ними находят линию Сц.
 Направление проекции продольной оси зуба 5| на задней стенке модели обозначают как Dn- Через линии Сц и Dn проводят также две параллельные линии и получают направление всех трех опорных зубов, обозначенное как Ей (рис. 6, д). По найденным направлениям Ei и Ец на взаимно перпендикулярных плоскостях (сагиттальной и фронтальной) восстанавливают пространственную ориентацию линии-, проекция которой на указанные плоскости совпадает с Ei и Ец. Эта линия является направлением, или путем введения, протеза. Для ее обозначения примерно в центре модели укрепляют на воске штифт длиной 3—4 см. Далее ориентируют модель в руках таким образом, чтобы, если смотреть со стороны плоскости I, этот штифт был совмещен с направлением Ei, а со стороны плоскости II — с направлением Ец (рис. 6, е). При повторном (контрольном) осмотре в случае необходимости дополнительно корректируют пространственное положение штифта. Установленный таким образом штифт дает направление пути введения протеза. На этом заканчивается первый этап.
Направление проекции продольной оси зуба 5| на задней стенке модели обозначают как Dn- Через линии Сц и Dn проводят также две параллельные линии и получают направление всех трех опорных зубов, обозначенное как Ей (рис. 6, д). По найденным направлениям Ei и Ец на взаимно перпендикулярных плоскостях (сагиттальной и фронтальной) восстанавливают пространственную ориентацию линии-, проекция которой на указанные плоскости совпадает с Ei и Ец. Эта линия является направлением, или путем введения, протеза. Для ее обозначения примерно в центре модели укрепляют на воске штифт длиной 3—4 см. Далее ориентируют модель в руках таким образом, чтобы, если смотреть со стороны плоскости I, этот штифт был совмещен с направлением Ei, а со стороны плоскости II — с направлением Ец (рис. 6, е). При повторном (контрольном) осмотре в случае необходимости дополнительно корректируют пространственное положение штифта. Установленный таким образом штифт дает направление пути введения протеза. На этом заканчивается первый этап.
Второй этап начинается с укрепления модели на столике параллелометра. Наклоняя площадку столика, ориентируют модель в пространстве таким образом, чтобы направление выставленного штифта совпало с направлением стержня параллелометра. При этом направление стержня относительно положения модели будет соответствовать пути введения протеза (рис. 6, ж). Фиксируют найденное положение площадки столика параллелометра, после чего вместо стержня параллелометра устанавливают держатель с грифелем и наносят линию обзора на все опорные зубы. *
Как показали наши исследования, этот метод имеет определенные недостатки. В частности, нанесение проекции продольных осей зубов на боковую и заднюю стенки модели производится на глаз. Недостатком является также сложность укрепления отрезков проволоки воском на каждом зубе, в связи с чем метод не нашел широкого практического применения. Определение пути введения содержит ошибку. Так, предлагается установить на воске штифт, указывающий направление введения протеза примерно в центральном участке модели. Такая рекомендация неверна в принципе: установку штифта следует производить в точке пересечения мысленно восстанов-
ленных перпендикуляров к плоскостям I и II в точках, совпадающих с Ei и Еп (как показано на рис. 6, ж пунктиром). Применение метода усложняется при нанесении проекции осей и параллельных линий на заднюю стенку модели нижней челюсти в связи с ее конфигурацией и небольшой площадью по сравнению с задней стенкой модели верхней челюсти. В. Н. Копейкин (1985) указывает на трудоемкость метода и считает его показанным в основном при изготовлении простых бюгельных протезов.
B. А. Щербаков (1971) предложил оригинальный
способ определения пути введения протеза с помощью
измерения транспортиром углов наклона опорных зубов
в сагиттальной н фронтальной плоскостях и последую
щего вычисления средней арифметической величины
наклона, в соответствии с которой модель наклоняется
на столике параллелометра.
C. Д. Шварц (1972) отмечает, что методика опреде
ления пути введения протеза по среднему углу наклона
продольных осей всех опорных зубов является недоста
точно эффективной, так как при ней не учитываются
функциональное состояние опорных зубов, эстетический
фактор и степень ретенции кламмеров. Поэтому опреде
ление среднего угла наклона зубов, учитывая неточ
ность выявления их продольных осей на модели, этот
автор предлагает считать предварительным, или ориенти
ровочным, этапом. С. Д. Шварц считает излишним опре
делять этот угол по нескольким (4—5) опорным зубам,
так как основная^фиксация бюгельного протеза обеспе
чивается двумя опорными зубами, расположенными со
ответственно кламмерной линии (в диагональном нап
равлении на верхней челюсти и в трансверсальном — на
нижней). Поэтому при сохранившихся на челюсти перед
них зубах и молярах (II — III класс по Кеннеди) предла
гается вначале определить кламмерную линию, а
затем — средний угол наклона продольных осей двух ос
новных опорных зубов (соответственно кламмерной ли
нии). Затем стержень параллелометра совмещают с
этой средней осью, после чего изучают расположение
линии обзора. При недостаточной опорной или удержи
вающей зоне на медиальном опорном зубе следует из
менить положение за счет наклона с целью более удоб
ного размещения линии обзора на передней опоре. При
дефектах III класса для определения среднего угла на
клона зубов учитывают их функциональное состояние,
|
|

|
|
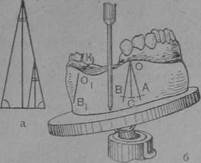
Рис. 7. Определение биссектрисы в модификации В. И. Кулаженко
и С. С. Березовского.
а — принцип подобия треугольников; б — определение биссектрисы в сагиттальной плоеко'-ти; в — то же в трансверсальной плоскости и путь введения
протеза.
наклоняя модель в сторону устойчивого зуба. Указанные манипуляции рекомендуется проводить в сагиттальном направлении, наклоняя модель вперед и назад, после чего опорные зубы изучают в трансверсальном направлении при правом и левом положении модели для определения средней оси. Затем закрепляют достигнутое положение столика параллелометра, заменяют стержень грифелем и наносят обзорную линию на опорные зубы. Метод требует некоторой коррекции, так как выбор двух основных зубов, расположенных диагонально или трансверсально, не всегда соответствует наиболее наклоненным опорным зубам, расположенным в сагиттальной и фронтальной плоскостях. Кроме того, линейное расположение кламмеров применяется преимущественно при изготовлении пластиночных протезов. В бюгель-ных протезах, имеющих небольшие базисы, как правило, применяется плоскостная фиксация с использованием не менее трех опорных зубов. В связи с этим определение пути введения по двум опорным зубам, по-видимому, более целесообразно только в случаях изготовления бюгельных протезов с двумя кламмерамп, например при I классе дефекта зубного ряда (по Кеннеди).
В. И. Кулаженко и С. С. Березовский (1975) предложили использовать известный в геометрии принцип подобия треугольников (рис. 7, а), что позволяет, как показано на рис. 7, б, находить искомый угол пере-
сечения осей непараллельных зубов и его биссектрису непосредственно на стенке модели (рис. 7, в).
Э. Р. Хачатуров и Г. Т. Сухарев (1980) рекомендуют определять оптимальный путь введения протеза с помощью угломерного механизма, выполненного ими в виде дуги с раздвижной линейкой и измерительного наконечника, который устанавливают на свободном конце линейки. Вначале определяют углы наклона опорных зубов. Затем находят (как среднее арифметическое) средние углы наклона для всех возможных сочетаний опорных зубов (по три), а также сумму квадратичных отклонений трех зубов каждого сочетания от среднего угла наклона этих же зубов. Из всех возможных сочетаний зубов выбирают три таких зуба, для которых сумма квадратичных отклонений (наклона их осей от оптимальных) является минимальной. После этих вычислений модель ориентируют в соответствии со средним углом наклона выбранных трех опорных зубов и наносят эква-торную линию.
Разработанная нами совместно с С. Д. Пельцем методика определения пути введения протеза (рис. 8) основана на следующих математических положениях. Направление продольной оси зуба можно перенести в любую точку модели. При этом проекции оси на любую плоскость останутся параллельными друг другу. При проектировании угла, находящегося в одной плоскости, на другую плоскость проекция биссектрисы делит спроецированный угол пополам. Предлагаемый способ также основан на методе определения биссектрисы, однако принципиально отличается от известных тем, что в нем отсутствует проецирование продольных осей опорных зубов на какие-либо плоскости, а производится пространственное определение пути введения.
Метод применяется при любом количестве опорных зубов. Для облегчения работы выбирают три ниболее наклоненных опорных зуба, расположенных в различных участках зубного ряда. На дно модели нижней челюсти или на небную поверхность верхней наносят слой пластилина толщиной 4—5 мм. Укрепляют модель на столике параллелометра. Определяют последовательно (с помощью стержня параллелометра)-направление продольных осей двух опорных зубов. Для этого устанавливают стержень параллелометра над центром жевательной поверхности или режущего края одного из опорных зубов. Наклоняя площадку столика в разные стороны, доби-
О Яякяч We 7QSI

Рис. 8. Метод определения биссектрисы (по В. И. Шевченко и др. ). а—в — этапы определения; г — путь введения протеза.
ваются совмещения стержня с воображаемой продольной осью этого зуба. При этом ориентируют стержень соответственно направлению всех стенок коронки зуба. Исключением является лишь небная или язычная стенка передних зубов в связи с ее вогнутостью и значительным отклонением от остальных стенок. В качестве ориентира на этой поверхности используют лишь зубной бугорок. Совместив стержень параллелометра с осью изучаемого зуба, фиксируют полученный при этом наклон площадки столика параллелометра. Затем перемещают стержень на дно или небную поверхность модели и параллельно ему укрепляют в пластилине металлический штифт диаметром 1 мм и длиной 60 мм. Аналогичным образом определяют продольную ось второго зуба и обозначают ее с помощью металлического штифта. При этом добиваются, чтобы второй штифт пересекался и соприкасался с ранее установленным штифтом на высо-
те примерно 50—60 мм над поверхностью пластилина. Выставленные таким образом штифты образуют плоскость, в которой строят биссектрису угла, заключенного между штифтами. Для этого, наклоняя столик с моделью, прежде всего устанавливают стержень паралле-лометра в плоскости, образованной пересекающимися штифтами (с целью увеличения точности рабочая часть стержня параллелометра должна быть диаметром не более 1 мм). Затем стержень параллелометра выставляют по биссектрисе угла наклона между штифтами в той же плоскости или в плоскости, параллельной ей, на небольшом расстоянии от плоскости, образованной штифтами (рис. 8, а). Фиксируют полученный при этом наклон площадки столика и удаляют оба штифта. Затем устанавливают новый штифт на пластилине параллельно стержню параллелометра, т. е. по направлению биссектрисы между осями первых двух опорных зубов (рис. 8, б).
При изготовлении конструкции с двумя опорными зубами на этом заканчивается поиск пути введения; полученная биссектриса используется в качестве ориентира пути введения протеза.
С помощью стержня параллелометра определяют продольную ось третьего опорного зуба. Закрепляют ее положение в пластилине при помощи штифта, который устанавливают таким образом, чтобы он пересекался со штифтом, обозначающим ранее найденную биссектрису. В результате эти штифты также образуют новую плоскость, в которой аналогичным образом строят биссектрису угла между штифтами (рис. 8, в). Найденное положение модели относительно стержня параллелометра соответствует направлению введения протеза (рис. 8, г). Фиксируют положение площадки столика с моделью и с помощью измерительных стержней (калибров) оценивают полученную при этом ретенционную зону на каждом опорном зубе. Направление введения обязательно должно быть согласовано с глубиной захвата с учетом модуля упругости применяемого сплава, анатомическими особенностями опорных зубов (высотой коронки и кривизной ее стенок), топографией дефектов зубного ряда, эстетическими требованиями, конструктивными особенностями каркаса, наиболее щадящим объемом обработки твердых тканей зубов при изготовлении несъемной конструкции.
При несоответствии этим условиям (в случае изго-
товления съемных конструкций) допускается коррекция найденного направления введения с помощью наклона модели '. В соответствии с найденным направлением введения решают остальные задачи.
Предложенный способ является более простым по сравнению с другими, основанными на методе биссектрисы: не требует измерительных инструментов и черчения и может быть применен в параллелометре любой конструкции. Клинические испытания метода показали его эффективность при изготовлении съемных и несъемных цельнолитых и паяных конструкций.
Фиксация избранного пути введения протеза одним из методов его повторного воспроизведения. Для точного решения лабораторных задач должна быть предусмотрена возможность воспроизведения данных клинической параллелометрии в технической лаборатории. Основой этой взаимосвязи является знание и применение методов воспроизведения пути введения протеза. Решая задачи клинической параллелометрии, врач должен в каждом случае зафиксировать найденный им путь введения протеза. С помощью этого же метода техник получает возможность воспроизвести путь введения протеза в параллелометре и решать лабораторные задачи на его основе.
В настоящее время известно несколько методов фиксации избранного пути введения протеза. Одним из них является метод фиксации и воспроизведения пути введения протеза с помощью четырех контрольных линий, нанесенных на переднюю, заднюю и боковые стенки модели. Методика их нанесения заключается в следующем. Закончив определение пути введения протеза, подводят стержень для манипуляций (отображающий направление этог& пути) поочередно к передней, задней и боковым стенкам модели. Направление стержня на каждой из стенок отмечают карандашом. С помощью гипсового ножа вдоль каждой линии создают клиновидное углубление. При дублировании эти углубления воспроизводятся на стенках огнеупорной модели. Клиновидные углубления, с помощью которых был зафиксирован путь введения протеза, используются при необходимости и для его воспроизведения. С этой целью модель устанавли-вают^на столик параллелометра. Стержень для манипуляций поочередно совмещают с каждым из четырех клиновидных углублений за счет наклонов столика. До-
бившись параллельности стержня с каждым из клиновидных углублений при неизменном положении модели, считают воспроизведение пути введения законченным, после чего приступают к решению запланированных задач: блокированию поднутрений, перенесению " линии обзора и др. Недостатком метода является невозможность его применения при выраженном боковом или переднем наклоне модели. При этом точно нанести клиновидные углубления на все стенки и воспроизвести положение модели не представляется возможным.
A. D. Rebossio (1963) после определения пути введения протеза, с целью его повторного воспроизведения, фрезерует на небной поверхности модели для верхней челюсти или на дне — для нижней отверстие, в которое устанавливается цилиндрическая втулка. В нее при необходимости воспроизведения положения модели вводят стержень параллелометра. Перед дублированием рабочей модели в эту втулку устанавливают штифт, который переходит в коллоидную массу, а из нее — в огнеупорную модель. При совмещении этого штифта со стержнем параллелометра огнеупорную модель устанавливают соответственно избранному ранее пути введения.
С. Д. Шварц (1968) предложил для фиксации и воспроизведения пути введения, а также для получения гипсовой подставки, воспроизводящей наклон модели, использовать восковой базис, в котором с помощью гипса укрепляется бор для прямого наконечника. С этой целью на модель, находящуюся в параллелометре (в соответствии с найденным углом наклона и путем введения протеза) накладывают восковой базис, наливают в него небольшое количество гипса и фиксируют в нем бор, который до кристаллизации гипса совмещают со стержнем-анализатором параллелометра. После отверждения гипса базис снимают и передают в лабораторию. Для установки огнеупорной модели в параллелометре на нее накладывают базис с загипсованным бором и устанавливают на столик параллелометра. Затем наклоняют столик с огнеупорной моделью, стремясь совместить ось бора, укрепленного в гипсе, с осью стержня для манипуляции параллелометра и воспроизвести путь введения протеза.
Использование метода затруднительно при работе с моделью нижней челюсти. Наложение воскового базиса с гипсовой модели на огнеупорную не представляется возможным, так как на последней заблокированы поднут-
рения и созданы выступы для получения зазора в области дуги и базисных отростков (седел).
В. И. Кулаженко и С. С. Березовский (1975) разработали метод воспроизведения наклона модели на столике параллелометра с помощью штифта, установленного в модели. С этой целью после поиска пути введения с помощью фрезы в центре гипсовой модели создают отверстие глубиной 1 см и заливают его липким воском, в который устанавливают металлический стержень или бор. Бор ориентируют таким образом, чтобы он был параллелен стержню-анализатору параллелометра. После этого решают остальные задачи (наносят линию обзора и т. д. ). Для повторной установки модели в параллелометр ее положение ориентируют, как уже отмечалось, с помощью метода совмещения стержня на модели со стержнем-анализатором параллелометра.
В. Н. Копейкин, Е. М. Любарский, В. Ю. Курляндский, С. М. Эйдинов и И. В. Игонькин (1969) предложили осуществлять метод воспроизведения угла наклона модели и пути введения протеза при помощи координатного устройства. По этому методу после определения пути введения фиксируют угол наклона модели с помощью специальной плоскости параллелометра. С этой целью по трем наиболее выпуклым точкам на окклюзионной поверхности зубов или альвеолярных гребней гипсовой модели, расположенным в одной горизонтальной плоскости, устанавливают пространственную плоскость координатного устройства таким образом, чтобы она коснулась найденных точек. Это положение плоскости отмечают по двум шкалам координатного устройства. Записав координаты, модель снимают и дублируют. Полученную огнеупорную модель устанавливают на столик параллелометра в таком положении, чтобы те же наиболее выпуклые точки окклюзионной поверхности зубов или альвеолярных гребней коснулись пространственной плоскости, установленной по отмеченным ранее координатам. Затем по общепринятому методу наносят линию обзора и размечают положение остальных элементов конструкции. Координатное устройство укреплено постоянно на горизонтальном кронштейне оригинальной конструкции параллелометра, также разработанного указанными авторами.
Нами (В. И. Шевченко, Е. С. Ирошникова, Л. С. Захарова) разработан метод воспроизведения пути введения протеза и угла наклона модели при помощи устано-
вочной координатной планки. После определения пути введения на стержень для манипуляций параллелометра навинчивают крестообразную установочную планку (рис. 95 а). Поворотом кронштейна стержень перемещают внутрь зубного ряда и устанавливают на нерабочую часть модели, например на дно модели для нижней челюсти или на линию А на модели для верхней челюсти. В случае неплотного прилегания планки к поверхности модели из-за особенностей ее рельефа и наклона гипсовым ножом выравнивают площадку размером 1, 5х 1, 5 см, добиваясь плотного, без зазора, прилегания планки к поверхности модели. Затем очерчивают контур планки химическим карандашом. Укрепляют в цанговом патроне параллелометра прямой наконечник бормашины с фис-сурным бором. В соответствии с контуром планки на подготовленном участке модели формируют крестовидную полость. Ее направление и глубину корректируют введением и выведением стержня с установочной координатной планкой, отражающей угол наклона модели в трех взаимно перпендикулярных плоскостях. Зафиксировав положение модели, устанавливают другие сменные принадлежности и решают остальные задачи парал-лелометрии (наносят линию обзора и др. ). Снимают гипсовую модель, наносят чертеж конструкции и передают в лабораторию. Осуществив необходимую подготовку модели, производят ее дублирование. Полученную огнеупорную модель укрепляют на вращающейся площадке столика параллелометра. Стержень с установочной координатной планкой вводят в посадочную полость, образовавшуюся в огнеупорной модели в процессе дублирования (рис. 9, б). Затем фиксируют воспроизведенный угол наклона и путь введения модели рычагом, ограничивающим наклоны вращающейся площадки столика, наносят на опорные зубы линию обзора и другие отметки для воспроизведения чертежа запланированной конструкции. Воспроизведение угла наклона как рабочей, так и огнеупорной модели осуществляется с большой точностью, так как установочная координатная планка располагается непосредственно на стержне для манипуляций параллелометра. Это исключает как возможность осевого смещения, так и необходимость совмещения осей или других поверхностей, что предусмотрено в изложенных выше методиках. Фиксация избранного при параллелометрии пути введения или наклона модели, как и последующее воспроизведение, осуществ-
|
| |
|
|
|
