 |


Отправлено 11 Июнь 2012 - 23:15
|
|
|
|
 Вятка PR, 11 июня 2012
Вятка PR, 11 июня 2012 
·  Новичок
Новичок
· Группа: Пользователи
· Сообщений: 7
· Регистрация: 11 Июнь 12
Отправлено 11 Июнь 2012 - 23: 15
... Я вот продвигаю идею систем типа " оператор-аватар", придумал как общую схему, так и один из вариантов гидропривода – цифровые гидроцилиндры и управление для них. Хотел бы получить консультацию специалистов, разъяснения по поводу сравнительной перспективности и реализуемости различных гидравлических схем привода для таких систем. Основная тема была на " roboforum" (уже удалили) поэтому МОИ сообщения в тему записал в виде файла (конкретные предложения по гидравлике – в июне 2012), в http: //vkirove. ru/ta... hp? f=28& t=16276, в сообщении от 23 апреля 2012.
... Даже если вы не верите в " аватары", может быть, вас заинтересует идея быстрых, со временем срабатывания 1 мс, цифро-силовых гидравлические блоков? Свои идеи на предмет новизны НЕ проверял, " подарил" всем, так сказать, но, по-моему, это настоящая " золотая жила". Прошу поддержать мои идеи.
29 июня 2012. Перенёс материалы по гидравлике СЮДА.
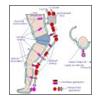
... Гидравлический привод системы " аватар" складывается из привода робота-аватара и привода экзоскелетона (Рис. 1). Здесь рассмотрим только силовой привод для экзоскелетов, " аватаров", андроидов..
 Открыть ТУТ:
Открыть ТУТ: 
... Я выбрал для примера (расчётов) " локтевое" сочленение человеческой руки, ориентировочно длина " рычага" 30 см, максимальная длительная сила на конце 25 кГс (не для супермена! ), соответствует моменту сил M = 75 Н*м. Требование к скорости – 10 " ходов" по 135град. в сек, или 3, 75 " оборота" в сек. Желательно, чтобы масса привода была разумных пределах (1–1, 5 кГ). Всего в андроиде должно быть порядка 20 таких " мощных" приводов, не считая более мелких, мощность приводов без использования механических или гидравлических " вариаторов" получается очень велика (N = (M max)*(n max) (M – момент сил, n – " обороты" ), тогда для " локтевого" привода получим мощность порядка 1, 8 кВт, а для всего " андроида" (довольно хилого!! ) – порядка 36 кВт!! ).
|
|
|
... Электродвигатель " HC-MFS23 (В)" (см. http: //www. privod. ru... s/tech-mfs. htm) номинальной мощностью 200 Вт, весом (с усилителем) < 1 кГ, с редуктором 44: 1 (вес порядка 0, 6 кГ, если " TwinSpin", работа с перегрузками) обеспечит номинальный момент 28 Н*м, а максимальный в 3 раза больше, что соответствует " номинальной" силе руки 9, 3 кГс, " обороты" до 1, 9 об/сек (5 " ходов" в сочленении с максимальной амплитудой 135 град. ) – для многих применений более чем достаточно!!
... Механический вариатор (скорей всего многодисковый) для серводвигателя позволил бы уменьшить требование к мощности раз в 10, но.. есть большие сомнения в приемлемости массогабаритных характеристик такого вариатора и скорости его регулирования.
... Вместо электродвигателей можно использовать регулируемые гидромашины (также с редукторами), например, аксиально-поршневые (см. каталог c021519. pdf), в каталогах нет для них мощностей порядка 1, 8 кВт, но если уменьшить в 5-6 раз линейные размеры серийной гидромашины с управлением весом 32 кГ (мощность до 180 кВт при порядка 4000 об/мин. ), то получим мощность 1, 8 кВт при 5-8 тыс об/мин (КПД тот же, порядка 90-95%, давление 200 атм. ), вес такой гидромашины с управлением будет порядка 0, 2 кГ. Однако использование регулируемых гидромашин " вместо" электромашин, с постоянным их подключением к линии высокого давления нежелательно, поскольку мощности утечек будут слишком велики (> 0, 5 кВт при 200 атм. – сумма для всех приводов), да и управление гидромашиной (здесь – быстрое и точное задание её рабочего объёма) – дело непростое.
... Схемы с редуктором будут иметь низкий КПД на частичных нагрузках при наличии большого " возвратного момента" у редукторов. В современных роботах редукторы нужны для точного позиционирования, для " андроидов" нужна лишь сила (ну и датчик хода в сочленении с разрешением 1: 100 000, это отдельный вопрос), поэтому для них нет ограничений на использование гидравлики.
|
|
|
... " Классический" вариант гидравлики – электродвигатель с регулируемой гидропередачей закрытого типа " насос – гидроцилиндр". Номинальная мощность электромашины берётся порядка < 10% от (M max)*(n max), т. е. 100-180 Вт. Вес такой электромашины будет 0, 4–0, 6 кГ (аналог – серводвигатель " HC-MFS13 (В)). Гидромашина – с изменяемым в > 10 раз рабочим объёмом, вес мин.. Вес линейного гидромашины порядка 0, 2 кГ при 5-8 тыс об гидроцилиндра ориентировочно 0, 2 кГ. Общий вес привода 0, 8-1, 0 кГ, КПД высокий, кроме режима максимальных сил привода (выходную мощность " 180 Вт" на выходе электромашина может обеспечить лишь в режиме перегрузки до 2-х раз)...
... Наконец, вариант с " цифровой гидравликой ", – он имеет самые лучшие массогабаритные характеристики. Цифровая гидравлика – это гидроцилиндры (линейные, поворотные) или даже гидромашины, спроектированные специально для работы в режиме быстрых переключений с линии высокого давления на низкую и обратно с помощью специальных быстродействующих клапанов. Цифровые цилиндры объединяются в цифровые " блоки" или в гидромашины (терминологию можно ещё уточнить). В (многооборотных) гидромашинах коммутация рабочих камер может быть привязана к оборотам гидромашины (см. тему: http: //forum. mobilyo... hp? f=40& t=1012), в блоках цифровых цилиндров для роботов переключение рабочих камер происходит с тактовой частотой 100-200 раз в секунду одновременно для всех цилиндров блока, для которых нужно переключение. Величина сил (момента сил) на выходе " цифрового блока" определяется сложением сил (моментов) всех цилиндров, с целью сокращения числа переключающих клапанов и цилиндров следует использовать цилиндры " двойного действия" и " троичную" систему сил (моментов) цифровых цилиндров: плюс-минус 1, плюс-минус 3, плюс-минус 9, и т. д.; кроме того, можно добавить небольшую электромашину для сглаживания дискретности гидроцилиндров. Компенсация трения в цилиндрах и иного трения производится компьютером.
... " Цифровой блок" будет весить порядка 0, 3 кГ (линейный, а поворотный порядка 0, 5 кГ), экономичность – средняя (см. дальше), а вот цена может быть пока высокая??
... " Комбинированный привод" будет чуть дешевле (пока) и экономичней варианта с одними " цифровыми" цилиндрами: 3 " цифровых" гидроцилиндра 0, 3 кГ + электромашина 0, 3 кГ (до 8000 об/мин., работает с выходным моментом сил от +0 до +0, 2 Н*м без изменения знака) и редуктором " 35: 1" 0, 5 кГ (alphira 040). Получается: общий вес 1, 1 кГ, КПД выше, поскольку " мелкие" цифровые цилиндры, которые почти всегда " включены" в чисто гидравлическом " цифровом" варианте, и на которые приходится бОльшая часть утечек, здесь отсутствует, электромашина рассеивает в среднем порядка 1 Вт, редуктор можно брать пониженного качества.
|
|
|
... Расчёт " цифрового" блока гидроцилиндров двустороннего действия. Суммарный объём V = 9 см3 при давлении 200 атм. (Рис. 2). При " троичной системе" цифро-силового регулирования на " старший" цилиндр придётся 6 см3, объёмы цилиндров образуют геометрическую" прогрессию" со знаменателем 1/3 (вообще-то для " гистерезиса" срабатывания гидроцилиндров нужно брать порядка 1/2, 7 и т. п. ), и если делать привод только гидравлический, то для динамического диапазона сил 1000: 1 нужно всего порядка 7 (двусторонних) гидроцилиндров (при этом " ДД" 2: 1 за счёт изменения максимального давления 200-100 атм. ). Каждый " двусторонний" цилиндр управляется 2 клапанами, с задержкой 1 мс, с временнОй дискретностью порядка 100-200 раз в секунду (старшим гидроцилиндрам понадобится переключаться гораздо реже), обеспечивая плавность движений и сил.
 Открыть ТУТ:
Открыть ТУТ: 
... Обычные уплотнения, " поршневые кольца", я думаю, будут плохо работать при медленных движениях (полусухое трение) и частых, до десятков раз в секунду, быстрых перепадах давления " P min – P max". Сильное прижатие уплотнительных элементов при малых скоростях вращения приведёт к полусухому трению с сильными перепадами коэфф. трения (тут главное – непредсказуемость сил трения?, плохо для систем " аватар" ) и сильному износу (загрязнение рабочей жидкости, а для надёжности микроклапанов и их приводов нужно очень чистое масло).
... Одно из решений " проблемы уплотнений" – обойтись вовсе без уплотнений. Результаты (для получения максимального КПД и минимальных сил трения) таковы:
а) нужно очень густое масло, порядка 1000 сСт (" глубина" щелей 3 мм), – это может быть только " силикон", он к тому же обладает высокой температурной стабильностью вязкости, а его плохие противозадирные качества не имеют значения, если не будет соприкосновения " трущихся" поверхностей.
б) нужны очень маленькие зазоры в цилиндрах, порядка 10 мкм, с допуском не более 1-3 мкм на всей протяжённости соприкосновения поршней и цилиндров!!, – это трудно, но реализуемо; зазоры меньшей величины невозможны и из-за деформаций цилиндров и поршней под давлением (до 200 атм. ), особенно чувствительны к давлению боковые стенки поворотных гидроцилиндров, если их " заузить".
в) " линейная" гидромашина (блок 6-7 цилиндров) той же рабочей ёмкости, что " поворотная", и при тех же допустимых зазорах (10 мкм) имеет в 2-3 раза меньшие " утечки и силу трения", чем поворотная гидромашина.
г) абсолютные показатели для поворотного блока (1 локтевой сустав, шарнир): мощность утечек в цилиндрах при " 200 атм. " порядка 1-10 Вт в зависимости от нагрузки и деформаций (при " 100 атм. " в > 4 раза меньше); из сил трения до максимальных скоростей преобладает " вязкое" трение, в т. числе при движении жидкости в золотниках, эти силы при максимальной скорости движения – порядка 5-10% от максимального момента сил двигателя, они в принципе предсказуемы (для компенсации).
д) вязкость масла 1000 сСт создаёт проблемы с микро-клапанами и их приводом, увеличивая их размеры и мощность привода; при уменьшении линейных размеров клапанов их пропускная способность уменьшается в кубической степени от размеров (т. к. средняя скорость жидкости уменьшается пропорционально уменьшению линейных размеров из-за вязкости)..
... В расчётах золотников я исходил из вязкости рабочей жидкости 1000 сСт. При такой вязкости целесообразно применять золотники, напоминающие по действию клапаны, с приводом между ними (см. Рис. 3); техническое решение предусматривает обычное для золотников " гидравлическое центрирование", которое исключает контакт трущихся поверхностей. Эти золотники целесообразно размещать.. прямо в каналах гидроцилиндров.
 Открыть ТУТ:
Открыть ТУТ: 
... Управление золотниками – через пьезоактюаторы, при этом для старших цилиндров (на Рис. 2 – для №№ 1-3) управление основными золотниками – через промежуточные золотники, а для " младших" цилиндров целесообразно прямое управление от пьезоактюаторов, точнее – в любом случае через умножитель хода, поскольку ход пьезоактюаторов порядка 10-20 мкм (пьезоактюаторы изгибного типа слабоваты), а ход золотников – сотни микрометров; " умножитель хода" лучше выполнить на гидравлике, используя поршень с мембраной, – мембрана не только предотвращает лишние утечки, но и фиксирует конец пьезоактюатора (я сделал расчёт – ей хватит и прочности, и гибкости; мембрану можно заменить на более простой " эластичный элемент" ? ).
... Быстродействие золотников – порядка 1 мс и меньше; зазоры в золотниках можно взять меньше, чем в " цилиндрах" – 2-5 мкм, при этом мощность утечек (при " 200 атм. " ) в наибольшем золотнике порядка 0, 05 Вт (" центрирование", возможно, удвоит эту мощность? – тут я НЕ проводил расчёт, – слишком сложно.. ), в остальных золотниках ещё меньше (особенно если уменьшать зазор). " Заклинивания" золотников быть не должно, поскольку рабочая жидкость очень чистая, а максимальное время пребывания золотников " в покое" будет отслеживаться компьютером...
... Я взял параметры пьезоактюаторов из " Catalog_of_devices. pdf" НИИ " ЭЛПА", актюаторы из керамики " ЦТС-46", вроде бы " в десятки раз" дешевле аналогов (?? ), но всё-таки с применением " благородных металлов", в одном ЭТОМ " блоке цилиндров" (на Рис. 1) – 12-14 пьезоактюаторов, цена которых определяется в осн. их объёмом; объём пьезоактюаторов может быть существенно снижен по сравнению с показанным на Рис. 2 – применением промежуточных золотников, уменьшением вязкости жидкости, снижением быстродействия золотников.. Допустимо снизить вязкость рабочей жидкости до 300 сСт при зазорах цилиндров 10 мкм – " поворотная ГМ (блок)" будет при этом иметь мощность утечек до 30 Вт, и если совокупность гидроприводов (аватара, например) можно представить как примерно 20 таких гидромашин, то суммарные утечки составят где-то до 600 Вт (при P max = 200 атм. ).
|
|
|
|
|
|
... " Чистый" гидросиловой блок получился сложным: 14 актюаторов и 20 клапанов в многочисленных сверлениях в " статоре" с десятками каналов, влияние сил давления рабочей жидкости на зазоры или на работу пьезоактюаторов, сверхвысокая точность изготовления всех деталей... Начинать нужно с более дешёвых и привычных схем. Для начала – ОДИН (двусторонний) гидроцилиндр + серводвигатель с редуктором, тут гидроцилиндр будет выполнять лишь функцию " грубой силы" в очень редких случаях, позволяя удвоить-утроить силу электропривода. Затем – схемы с 2-3 гидроцилиндрами + " серводвигатель с редуктором".
... В " гидросиловых блоках" (Рис. 2) можно оставить только ТРИ старших цифровых гидроцилиндра, а вместо остальных – поставить сервомотор " HC-MFS13 (В)" с редуктором 23: 1, сервомотор весит 0, 53 кГ, а его момента сил (с запасом в 1, 5 раза) хватит, чтобы работать даже без изменения знака силы (момента) при переключении гидроцилиндров.
... В варианте без уплотнений средние зазоры в первых моделях гидросиловых блоков могут доходить до 20 мкм, лучше использовать " линейные" гидроцилиндры.
... Но скорей всего на первых моделях будут уплотнения, для снижения стоимости, в этом случае толщина уплотнений (которые прижимаются к трущейся поверхности давлением " P max" ) такого же порядка, что и зазоры (100 мкм), и если считать величину трения уплотнения по " цилиндру" как для сухого трения, где-то 10%?, то для " поворотной гидромашины" (блока) величина трения составит 3% от силы (момента сил) гидромашины, для линейной – раза в 4 меньше. Если давление " P max" подавать только на уплотнения " нагруженных" гидроцилиндров, то величину этого полусухого трения можно снизить до почти не существенного уровня. Всё-таки останется проблема загрязнения рабочей жидкости при таком трении. Низкая вязкость масла вызовет проблему утечек в золотниках, – эта проблема элементарно решалась бы уменьшением зазоров (до 1-2 мкм), но беда в том, что для таких рабочих зазоров требуется очень тонкая очистка масла.. – это расчётам не поддаётся, но вроде бы и " не смертельно", отличие от " классической" гидравлики не так уж велико??
... Ещё о технических проблемах и решениях.
... Для поворотной гидромашины решение проблемы жёсткости " крышек" (перегородок) – рациональным чередованием больших и малых цилиндров, корпус собирается из 3 частей, которые затем " свинчиваются", лопатки в маленьких гидроцилиндрах выдвигаются из пазов " ротора" (при сборке), гидрораспределители располагаются в сверлениях по всей окружности " статора" (клапаны – прямо в каналах гидроцилиндров). Гидроцилиндры №4 и " младше" практически не влияют на размеры поворотной гидромашины.
... Для решения проблемы " защемления" масла в рабочих камерах во время коммутации линий (за 0, 5 мс изменение объёма рабочей камеры при максимально быстром движении " 10 ходов/сек" будет порядка 1/200 от её максимального объёма) в области рабочих камер или золотников помещаются элемент с заданной упругостью, можно использовать и предохранительные микроклапаны (возвратные), и увеличивать " подпор", а для малых цилиндров возможно уменьшение времени переключения до 0, 1 мс (гидроударов не будет, поскольку линии короткие, а скорость жидкости в них невелика), у каждой гидромашины – возможен небольшой демпфирующий пневмоаккумулятор.
... Потери на сжимаемость масла при быстрой коммутации гидроцилиндров пропорциональны скорости изменения силы (момента сил), временнОй дискретности коммутации и сжимаемости масла, и пропорциональны квадрату " P max". Например, при скорости изменения силы (руки) 25 кГс/сек, дискретности коммутации " 100 раз/сек", сжимаемости масла 1%/100 атм. и давлении 200 атм. средние потери на сжимаемость масла составят 11 Вт, но для " обычной" деятельности в среднем не превысят 1 Вт. Потери на гидропривод золотников ничтожны, потери на привод пьезоактюаторов также очень малы даже для вязкости масла 1000 сСт и без рекуперации подаваемой на них электроэнергии.
... Если " поворотному блоку цилиндров" с малыми зазорами (10 мкм) обычные подшипники не подойдут, то можно сделать " гидравлические", с гидравлическим центрированием как у золотников (при малых зазорах все пары трения можно представить как подшипники скольжения, но они держат нагрузку лишь короткое время). Для " линейного" блока цилиндров необходимы " гидравлические" подшипники-направляющие, их размеры можно значительно уменьшить если хотя бы часть гидроцилиндров (№ 2 или №№ 2-3) сделать " парными", располагая симметрично вокруг " старшего" гидроцилиндра, их можно расположить и в парах штоки-" крышки".
... Для привода пальцев рук (и кистей) – можно использовать магнитореологические муфты на общих валах и ленточные редукторы, но это отдельный вопрос..
|
|
|
