 |


Система автоведения поезда усавп-г, исавп-рт, рпда-г.
|
|
|
|
СИСТЕМА АВТОВЕДЕНИЯ ПОЕЗДА УСАВП-Г, ИСАВП-РТ, РПДА-Г.
В настоящее время на железнодорожном транспорте широкое применение получают универсальные системы автоматизированного управления поездом и регистрации параметров движения.
История развития
1957 г.
Создана первая автономная система автоведения для пригородных поездов.
1962 г.
На Московском метрополитене прошли испытания первой системы автоведения для электропоездов метрополитена.
70-80-е годы 20-го столетия:
На Московской и Октябрьской железной дороге проходят испытания систем автоведения для пассажирских поездов. Первые системы автоведения как и первые компьютеры, были очень объемными и занимали много места. Поэтому работы по совершенствованию комплекса автомашинист были приостановлены из-за громоздкости элементной базы и ее низких вычислительных возможностей.
1990 г.
Для подвижного состава железных дорог начали разрабатываться системы автоведения нового поколения.
1997 г. На московской железной дороге началось внедрение усовершенствованной системы автоведения для пригородных поездов на базе микро ЭВМ. Функции системы автоведения расширились, появился речевой информатор. Система автоведения не использует напольные датчики – все данные о скорости и пройденном пути снимаются измерительным преобразователем (ДПС) с колесной пары, а информация о расположении объектов пути хранится в ее памяти.
К концу 2004 года системой автоведения оборудован весь парк электропоездов железных дорог России и Белоруссии.
Наряду с системами автоведения для пригородных поездов велись работы по созданию автомашиниста для пассажирских и грузовых поездов, в том числе повышенной массы и длинны. На сегодняшний день применяемые системы автоведения не имеют аналогов в мире.
|
|
|
Область применения.
Современные системы автоведения относятся к автономным системам, т. е. свое местоположение и требуемые режимы ведения поезда система определяет самостоятельно.
Автомашинист электротяги и регистратор параметров разработаны на основе современных микропроцессорных технологий и сформированы на унифицированных блоках комплекса автоматизированного управления и диагностирования (КАУД).
В настоящее время в эксплуатации находятся:
- УСАВП
Система автоведения пригородных поездов (внедрение с 1997 г. ).
Используется на всех типах мотор-вагонного подвижного состава.
- УСАВПП
Система автоведения пассажирских электровозов (внедрение с 2000 г. ).
Используется на всех типах пассажирских электровозов: ЧС-2, ЧС-2к, ЧС-2т, ЧС-4,
ЧС-4т, ЧС-6, ЧС-200, ЧС-7. В настоящее время ведутся разработки системы
автоведения для электровоза ЭП-1 и тепловоза ТЭП-70.
- УСАВП-Г
Система автоведения грузового электровоза постоянного тока для одиночной тяги
(внедрение с 2001 г. ).
Используется на электровозах ВЛ-10, ВЛ-10у, ВЛ-11.
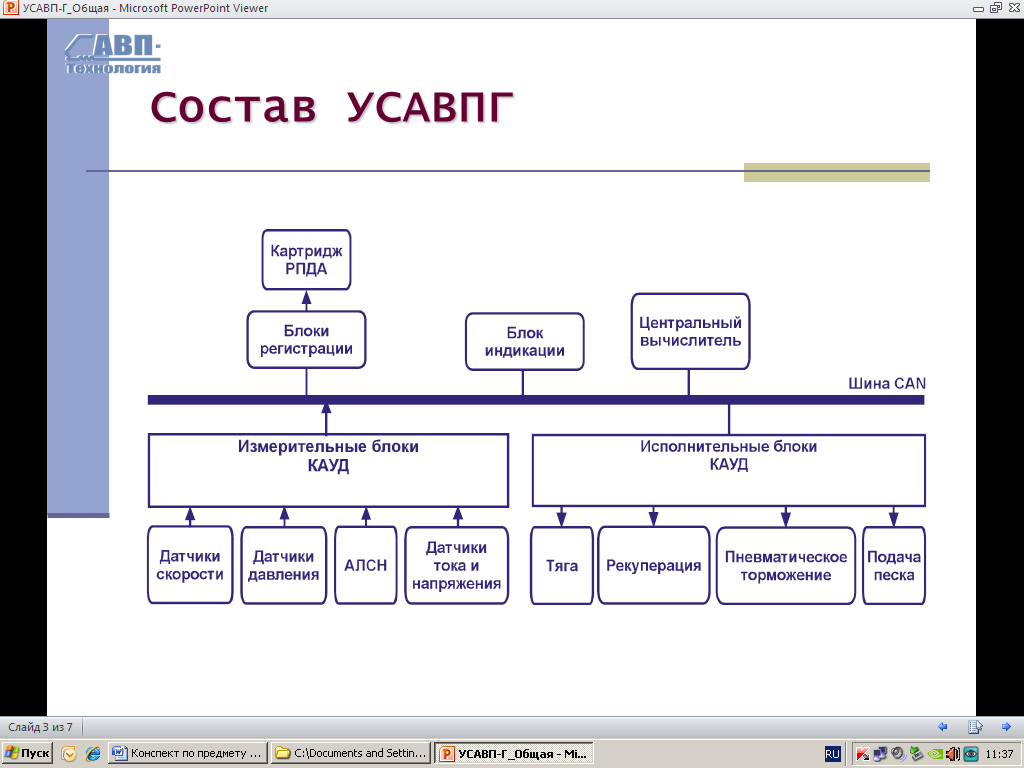
| Рис. 47. Структура УСАВП-Г |
- ИСАВП-РТ - интеллектуальная система автоведения сдвоенных поездов с распределенной тягой электровозов постоянного тока ВЛ-10, ВЛ-10у, ВЛ-11.
- УСАВП-ГПТ
Система автоведения грузового электровоза переменного тока для одиночной тяги
(внедрение с 2005 г. ).
Используется на электровозах ВЛ-80с, ВЛ-85.
Системы автоведения пригородных электропоездов, пассажирского и грузового движения представляют собой программно-аппаратные системы реального масштаба времени предназначенные для автоматизированного управления подвижным составом с соблюдением норм безопасности движения в соответствии с графиком движения на основе выбора энергетически рационального режима движения:
|
|
|
- Определяют фактические параметры движения поезда и выводят их на экран дисплея.
- Ведут расчет параметров движения поезда и управляющих воздействий.
- На основе выполненных расчетов управляют тягой и торможением.
Блоки систем автоведения соединены между собой CAN-сетью.
CAN-сеть – Controller Area Networks – шина предназначенная для скоростной передачи данных, позволяющая проводить самодиагностику системы.
Основным обработчиком информации является центральный процессор, который формирует управляющие команды на основе управляющей программы и полученных сетевых сообщений.
Во время движения поезда система осуществляет информационную поддержку машиниста с выдачей необходимой информации на дисплей блока индикации и речевых сообщений о приближающихся путевых объектах и сигналах светофоров.
Система постоянно информирует машиниста:
- О расчетном значении энергетически рациональной скорости (расчетной скорости).
- О фактическом значении скорости поезда.
- Об астрономическом времени.
- О координате, на которой находится поезд (километр, пикет).
- О текущем режиме ведения поезда.
- О текущем ограничении скорости.
- О следующем ограничении скорости и координате его начала.
- О состоянии сигналов локомотивного светофора.
- О текущем ускорении, с которым движется поезд.
- О позиции контроллера машиниста.
- О профиле пути на данном участке.
- О состоянии системы.
Системы автоведения и регистрации параметров ведения поезда состоят из подсистем:
|
|
|
