 |


Определение ускорения свободного падения при помощи оборотного маятника
|
|
|
|
Цель работы
Изучение метода оборотного маятника для определения ускорения свободного падения.
Идея эксперимента
Применение оборотного маятника основано на свойстве сопряженности центра качания и точки подвеса. Это свойство заключается в том, что во всяком физическом маятнике можно найти такие две точки, что при последовательном подвешивании маятника за ту или другую из них период колебаний его остается одним и тем же. Расстояние между этими точками определяет собой приведенную длину данного маятника.
Теория и описание экспериментальной установки
Если амплитуда физического маятника мала, то период его колебаний определяется формулой
 , (9.1)
, (9.1)
где J - момент инерции физического маятника относительно оси качания, l 1 -расстояние между осью качания и центром тяжести маятника, m - масса маятника.
По теореме Гюйгенса-Штейнера
 , (9.2)
, (9.2)
 где J 0 - момент инерции относительно оси, проходящей через центр тяжести и параллельной оси качаний, а величины J, m и l 1 те же, что и в формуле (9.1).
где J 0 - момент инерции относительно оси, проходящей через центр тяжести и параллельной оси качаний, а величины J, m и l 1 те же, что и в формуле (9.1).
Если последовательно подвешивать маятник в двух точках, то периоды его колебаний определяются уравнениями
 (9.3)
(9.3)
Отсюда имеем
 (9.4)
(9.4)
Для величины ускорения свободного падения из последней формулы после преобразований получаем уравнение, данное Бесселем:
 , (9.5)
, (9.5)
где l = l 1 + l 2 -приведенная длина маятника.
Если периоды равны между собой (T 1 = T 2 = T), уравнение принимает вид
|
|
|
 (9.6)
(9.6)
Добиться полного равенства периодов нелегко. Формула Бесселя позволяет достаточно просто и с неменьшей степенью точности определить величину ускорения при приближенном равенстве периодов колебаний.
Пусть T 1 и Т2 близки друг к другу, а величины а1 и а2 сильно отличаются одна от другой. В этом случае, как видно из формулы (9.5), нет необходимости определять величины а1 и а2 с большой степенью точности (не точнее чем 1 мм).
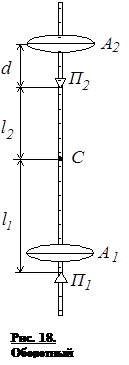
Оборотные маятники имеют различную форму. Они обычно состоят из металлического стержня длиной свыше 1 м. По стержню могут передвигаться и закрепляться тяжелые и легкие чечевицы (грузы) и опорные призмы.
Проведение эксперимента
Измерения и обработка результатов.
1. Готовят оборотный маятник к измерениям. Опорные призмы рекомендуется расположить на расстояниях 20 - 25 см от концов маятника. Подвижную чечевицу последовательно перемещают с шагом 1-2 см от конца маятника к призме П2. В отчете выполняют чертеж маятника с указанием всех размеров, определяющих геометрию маятника.
2. Маятник приводят в колебание на опорной призме П1 и определяют период колебаний Т1. Измерение периода проводят, беря не менее 10 колебаний. Угловая амплитуда колебаний не должна превышать 4 °.
3. Меняют ось колебаний, подвешивая маятник на другой призме. Проводят измерения периода Т2.
4. Перемещают чечевицу А2. Снова измеряют периоды колебаний на призмах П1 и П2. И т. д. Данные измерений заносят в таблицу 9.1 отчета.
5. По полученным данным строят графики зависимостей Т1 = f 1 (d) и Т2 = f 2 (d), где d - расстояние от призмы П2 до подвижной чечевицы. Точка пересечения кривых определяет такое положение чечевицы А2, при котором значения периодов наиболее близки.
6. Для найденного положения чечевицы А2 определяют периоды колебаний Т1 и Т2 (в прямом и перевернутом положении маятника) с наибольшей тщательностью. Определяют время 40 - 60 колебаний маятника не менее трех раз, откуда вычисляют средние значения периодов колебаний и погрешности их измерений.
|
|
|
7. Для определения положения центра тяжести маятника его тщательно уравновешивают на трехгранной подставке. Измерение расстояний l 1 и l 2 производят масштабной линейкой с точностью до миллиметра.
8. По полученным данным с помощью формулы Бесселя (9.5) определяют величину ускорения свободного падения.
9. Относительная погрешность измерения ускорения свободного падения определяется по формуле
 , (9.5)
, (9.5)
где величина D Т полная погрешность измерения одного из периодов.
10. В выводе сравнивают измеренное и табличное значения ускорения свободного падения.
ПРИМЕНЕНИЕ ЭЛЕКТРОННОГО ОСЦИЛЛОГРАФА
К ИССЛЕДОВАНИЮ КОЛЕБАНИЙ
Цель работы
Изучить устройство, работу электронного осциллографа и генератора звуковой частоты и их применение к исследованию электрических колебаний звуковой частоты.
Идея эксперимента
При изучении механических колебаний в студенческой лаборатории возникают большие сложности при постановке и выполнении некоторых опытов. Так, например, нелегко на механических моделях провести наблюдения явлений, возникающих при сложении колебаний, или проводить измерения характеристик затухающих колебаний. Это связано с трудностями изготовления соответствующих механических приборов и проведения измерений. В данной работе механические колебательные системы заменены на электрические – колебательные контуры и электрические генераторы, а основным измерительным прибором является электронный осциллограф, который обладает уникальными возможностями для наблюдения колебательных процессов. При этом наблюдения и выводы, сделанные в этой работе для электрических колебаний применимы и для механических колебаний.
Электронный осциллограф
 Блок-схема осциллографа представлена на рис.19. Основной блок осциллографа – электронно-лучевая трубка (ЭЛТ), в которой возникает и фокусируется электронный луч. Там же расположены системы, с помощью которых можно управлять движением луча, отклоняя его в вертикальном и горизонтальном направлениях. Движущийся луч
Блок-схема осциллографа представлена на рис.19. Основной блок осциллографа – электронно-лучевая трубка (ЭЛТ), в которой возникает и фокусируется электронный луч. Там же расположены системы, с помощью которых можно управлять движением луча, отклоняя его в вертикальном и горизонтальном направлениях. Движущийся луч
|
|
|
оставляет на экране трубки, покрытой специальным составом, светящийся след. Осциллограф имеет два входа. Сигнал, поданный на Вход 1, поступает на усилитель У1, а затем подается на вертикально отклоняющую систему ЭЛТ. Сигнал, поданный на Вход 2, поступает на усилитель У2, а затем подается на горизонтально отклоняющую систему ЭЛТ. В дальнейшем Вход 1 будем называть Y - входом, Вход 2 – X - входом.
Различают два основных режима работы осциллографа. В первом режиме на X - и Y - входы подаются два внешних сигнала. Переключатель П устанавливается в положение 1. В результате сложения этих сигналов, действующих по двум взаимно-перпендикулярным направлениям, на экране ЭЛТ появляется линия. Во втором режиме на Y-вход подается один внешний сигнал. Переключатель П поставлен в положение 2. На усилитель У2 подается входное напряжение от генератора развертки (ГР), обеспечивающее перемещение луча в горизонтальном направлении по линейному закону. На экране ЭЛТ возникает линия, характеризующая изменение внешнего сигнала во времени.
На рис. 20 изображена передняя панель осциллографа С1-1 (ЭО-7), на которой распо-
ложены экран ЭЛТ и основные ручки управления. С помощью тумблера «Сеть» включается блок питания осциллографа. Тумблер «Луч» включает ЭЛТ. Луч, генерируемый в трубке, можно сфокусировать ручкой «Фокус» и отрегулировать ручкой «Яркость». Ручки «Ось Y» и «Ось X» смещают луч в соответствующих направлениях.
 Сигнал, подаваемый на Y -вход, подводится к левым клеммам «Вход» и «Земля». Амплитуда сигнала регулируется усилителем У1, управляемым ручками «Усиление Y» (плавная регулировка) и «Ослабление» (грубая регулировка», расположенными в левой части панели.
Сигнал, подаваемый на Y -вход, подводится к левым клеммам «Вход» и «Земля». Амплитуда сигнала регулируется усилителем У1, управляемым ручками «Усиление Y» (плавная регулировка) и «Ослабление» (грубая регулировка», расположенными в левой части панели.
Сигнал, подаваемый на X -вход, подводится к правым клеммам «Вход» и «Земля». Амплитуда сигнала регулируется усилителем У2, управляемым ручкой «Усиление X» (плавная регулировка), расположенной в правой части панели.
|
|
|
Если осциллограф работает в первом режиме, то переключатель «П» поставлен в положения 1, чему соответствует установление ручки «Диапазон частот», управляющей генератором развертки у метки «Выкл».
Если ручку «Усиление X» поставить на нуль, а ручку «Усиление Y» поставить примерно на середину шкалы, то на экране осциллографа появится вертикальная линия, длина которой пропорциональна амплитуде исследуемого сигнала (при неизменном положении ручки «Усиление Y»). Выключив усилитель У1 и включив усилитель У2 (ручка «Усиление Х»), увидим на экране горизонтальную линию.
При одновременном включении ручек «Усиление Х» и «Усиление Y» светящийся следотэлектронного луча на экране будет перемещаться по траектории, образующейся в результате сложения взаимно перпендикулярных сигналов, подаваемых на «Вход Х» и «Вход Y».
Если осциллограф работает во втором режиме, то переключатель П поставлен в положение 2. В этом случае на горизонтально отклоняющие пластины ЭЛТ подается напряжение генератора развертки, имеющее «пилообразный» характер, то есть линейно нарастающее со временем, а затем также линейно убывающее. При этом время падения напряжения значительно меньше времени возрастания напряжения. И в этом случае при включении ручек «Усиление Х» и «Усиление Y» траектория следа электронного луча образуется в результате сложения сигналов, подаваемых на вертикально и горизонтально отклоняющие пластины. Если отношение частот этих сигналов выражается рациональной дробью, то на экране возникает устойчивое изображение развертки во времени сигнала, поданного на Y -вход.
Чтобы согласовать частоту ГР с частотой сигнала, поданного на Y -вход, ручку «Диапазоны частот» нужно установить у метки, примерно соответствующей предполагаемой частоте исследуемого сигнала. Полное согласование частоты ГР с частотой исследуемого сигнала достигается ручкой «Частота плавно».
Для полной синхронизации сигналов, подаваемых на горизонтально и вертикально отклоняющие пластины, можно использовать (при необходимости) переключатель «Синхронизация» и ручку «Амплитуда синхронизации». В левой части передней панели
осциллографа расположена клемма «Контрольный сигнал». К ней подведен источник синусоидальных колебаний с частотой 50 Гц, который можно использовать как эталонный источник колебаний.
Звуковой генератор ГЗ-33
 Генератор ГЗ-33 предназначен для получения синусоидальных электрических колебаний звуковой частоты от 20 до 200000 Гц. Амплитудаколебаний регулируется усилителем мощности. На выходе колебания подаются на вольтметр и делитель напряжения (аттенюатор), которой позволяет изменять выходное напряжение в широких пределах.
Генератор ГЗ-33 предназначен для получения синусоидальных электрических колебаний звуковой частоты от 20 до 200000 Гц. Амплитудаколебаний регулируется усилителем мощности. На выходе колебания подаются на вольтметр и делитель напряжения (аттенюатор), которой позволяет изменять выходное напряжение в широких пределах.
|
|
|
Ручки управления звуковым генератором выведены на его переднюю панель (рис.21). Частота колебаний устанавливается поворотом ручек «Множитель» (ступенчатая регулировка) и поворотом лимба (плавная регулировка). Для определения частоты генератора в герцах нужно отсчет по шкале лимба умножить на показания переключателя «Множитель». Вращением ручки «Расстройка, %» можно плавно изменять частоту в пределах ± 1,5% от установленной.
Возбуждаемые в генераторе колебания подаются на клеммы «Выход». Напряжение на выходе регулируется плавно с помощью ручки «Рег. выхода» и ступенчато (через каждые 10 дБ) при помощи переключателя аттенюатора, имеющего гравировку «Пределы шкал - ослабление».
Переключение пределов шкал в зависимости от выходного сопротивления производится переключателем «Вых. сопротивление». При работе с сопротивлением нагрузки значительно больше 600 Ом для правильного отсчета выходного напряжения следует включить внутреннюю нагрузку тумблером «Внутр. Нагрузка».
Теория
Сложение двух взаимно перпендикулярных гармонических колебаний
Рассмотрим плоское движение материальной точки под действием двух взаимно перпендикулярных квазиупругих сил F1 и F2. В прямоугольной декартовой системе координат x0y, начало которой совпадает с положением равновесия материальной точки, а оси 0x и 0y направлены вдоль линий действия соответственно силы F1 и силы F2,, уравнения движения имеют вид:

 , (10.1)
, (10.1)
где k 1 и k2 – коэффициенты квазиупругих сил F 1 и F 2. Зависимость координат от времени имеет вид:
 , (10.2)
, (10.2)
где  и
и  - собственные циклические частоты.
- собственные циклические частоты.
Таким образом, движение точки является результатом сложения двух взаимно перпендикулярных колебаний. Траектория точки заключена внутри прямоугольника, стороны которого параллельны осям 0 x и 0 y и соответственно равны 2А1 и 2А2, а центр совпадает с точкой 0. В случае рационального отношения частот w 1 и w 2 траектории замкнуты и называются фигурами Лиссажу. Вид фигур Лиссажу зависит от отношений w 2 / w 1, А2/А1 и разности фаз (j 2 - j 1) (рис.22) (при неизменном отношении А2/А1).
| Отношение частот | |||||
Сдвиг фаз




 1:1
1:2
1:1
1:2

 . (10.3)
. (10.3)