 |


13. Перемещения точки. Характеристика деформированного состояния точки.
|
|
|
|
13. Перемещения точки. Характеристика деформированного состояния точки.
Рассматриваются малые пластические деформации, т. е. деформации в данный момент времени. При деформации каждая точка смещается относительно первоначального своего положения. Пусть перемещение точки в пространстве определяется вектором  . Его составляющие
. Его составляющие  , тогда:
, тогда:
 ,
,
где 1, 2, 3 – направления разложения вектора  согласно правилу параллелепипеда.
согласно правилу параллелепипеда.
Если элементарный объем повернуть относительно осей 1, 2, 3, то составляющие относительно новых граней будут располагаться произвольным образом и тогда каждую из них можно разложить по правилу параллелепипеда на составляющие вдоль произвольных координат  , рис. 4. 1.
, рис. 4. 1.
В этом случае векторная сумма:

Каждая тройка перемещений соответствует одной площадке, т. е.:
 ;
;  ;
;  .
.
Касательные составляющие равны нулю, тогда:
 ;
;  ;
;  ,
,
т. е. нормальные составляющие перемещений достигают экстремального значения. Направление оси  определяется единичным вектором
определяется единичным вектором  , оси
, оси  - вектором
- вектором  , оси
, оси  - вектором
- вектором  .
.
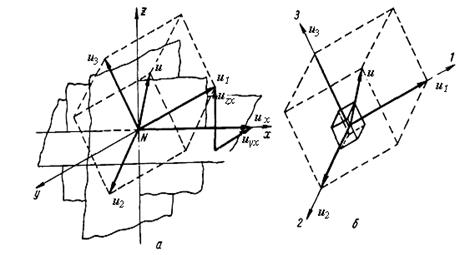
Рисунок 4. 1 - Перемещение материальной точки
Таблица вида:
 ,
,
представляет собой геометрическую сумму указанных векторов, что определяет полное перемещение . Через единичные вектора можно записать сумму:

Направления, которые определяют площадки, где отсутствуют касательные напряжения, задаются единичными векторами  ,
,  ,
,  . Тогда:
. Тогда:

Если перемещения заданы в приращениях, тогда:
 .
.
Через единичные вектора:
 .
.
Перемещения, которые задаются единичными векторами , , :

Проекции вектора определяют этот вектор и по модулю и по направлению. Действительно:
 ;
; 

 ,
,
где  - углы между вектором и осями 1, 2, 3. При известных направляющих косинусах, известно направление вектора
- углы между вектором и осями 1, 2, 3. При известных направляющих косинусах, известно направление вектора  в пространстве. Это относится и к произвольным координатам
в пространстве. Это относится и к произвольным координатам  . Направления 1, 2, 3 называют главными направлениями.
. Направления 1, 2, 3 называют главными направлениями.
|
|
|
14. Общая схема определения линейных и сдвиговых деформаций.
Деформация любого элементарного объема тела (параллелепипед), может быть представлена из ряда отдельных простейших деформаций, т. е. разложена на составляющие. Имеется шесть составляющих деформаций: три линейных (удлинений) и три угловых (сдвиги). Линейные деформации обозначаются  с индексом, указывающим направление удлинения. Положительной деформацией считается деформация удлинения. При данных деформациях изменяется объем и форма.
с индексом, указывающим направление удлинения. Положительной деформацией считается деформация удлинения. При данных деформациях изменяется объем и форма.
Положительному сдвигу соответствует уменьшение угла между направлением осей. Углы сдвига (относительные сдвиги), проектирующиеся на плоскость  , обозначаются
, обозначаются  или
или  , рис. 4. 2. Для других плоскостей -
, рис. 4. 2. Для других плоскостей -  или
или  и т. д. Считается, что при малых углах сдвига, объем остается неизменным. Угловые деформации не влияют на линейные.
и т. д. Считается, что при малых углах сдвига, объем остается неизменным. Угловые деформации не влияют на линейные.
Рисунок 4. 2 - Угловые деформации
Выразим компоненты деформаций через компоненты перемещений. Выделим в точке тела элементарный объем с бесконечно малыми ребрами  , параллельными осям координат. Проекция элементарного параллелепипеда на плоскость
, параллельными осям координат. Проекция элементарного параллелепипеда на плоскость  до деформации, точка
до деформации, точка  является проекцией рассматриваемой точки
является проекцией рассматриваемой точки  на плоскость, рис. 4. 3.
на плоскость, рис. 4. 3.

Рисунок 4. 3 - Перемещения точки в плоскости
После деформации точки получили перемещения, и перешли в положение со штрихом. В общем, все перемещения зависят от координат, при этом необходимо учитывать перемещения связанные и с пластической деформацией. Если перемещения вдоль соответствующих осей зависят и от производных по этим же координатам, то пластическое течение совпадает с общим перемещением точки. Если нет, то пластическое течение перпендикулярно общему перемещению и тогда появляются сдвиги. В первом случае:
|
|
|
 ,
,
где  - удлинение ребра в результате его деформации вдоль оси
- удлинение ребра в результате его деформации вдоль оси  .
.
Относительная деформация:
 .
.
Аналогично получим:
 ,
,
 .
.
Во втором случае:
 ;
;  ,
,
где  и
и  - смещение векторов перемещений
- смещение векторов перемещений  и
и  в поперечном направлении
в поперечном направлении  , что приводит к угловым сдвигам
, что приводит к угловым сдвигам  и
и  . Если их нет, смещаемые точки располагаются на прямых параллельных осям координат. Частные производные становятся равными нулю. Принимая
. Если их нет, смещаемые точки располагаются на прямых параллельных осям координат. Частные производные становятся равными нулю. Принимая  и
и  , запишем:
, запишем:
 .
.
Так как  значительно меньше единицы, то
значительно меньше единицы, то  . Тем же способом получим
. Тем же способом получим  . Тогда
. Тогда  . Следовательно:
. Следовательно:
 .
.
Принято выражать сдвиги в виде половинок, тогда  ,
,  . Причем
. Причем  . Индексация будет совпадать с индексацией касательных напряжений и касательных перемещений в предыдущем разделе. В итоге получим: относительные удлинения:
. Индексация будет совпадать с индексацией касательных напряжений и касательных перемещений в предыдущем разделе. В итоге получим: относительные удлинения:
 ,
,  ,
,  ,
,
относительные сдвиги:
,  ,
,  .
.
Эти уравнения получим О. Л. Коши. Линейные и сдвиговые деформации можно записать в виде таблицы:
 .
.
Значение  является тензором деформаций, обладающий такими же свойствами, как и тензор напряжений. Он полностью определяет деформированное состояние точки.
является тензором деформаций, обладающий такими же свойствами, как и тензор напряжений. Он полностью определяет деформированное состояние точки.
Из последних соотношений определим элементарные перемещения точек в результате пластической деформации, тогда:
 ,
,

 .
.
Если подставить последние соотношения в выражение для определения приращения вектора перемещения с учетом, что  , тогда:
, тогда:
 ,
,
или
 .
.
Для осесимметричного напряженного состояния в цилиндрических координатах без вывода:
 ,
,  , ,
, ,  .
.
Следует подчеркнуть, что пластической деформации в направлении координаты  нет. Деформация
нет. Деформация  определяется геометрическими построениями.
определяется геометрическими построениями.
Можно показать, что в цилиндрических координатах при объемном напряженно-деформированном состоянии компоненты тензора деформаций имеют вид:
,  , ,
, ,
 ,
,  .
.
На границе перемещение можно представить в виде:
 ,
,
не раскладывая предварительно на составляющие по главным направлениям.
|
|
|
